Happy Birthday, Robbie!
Der elektromechanische Sechsachs-Knickarmroboter wird 40 Roboter übernehmen Arbeiten, die für Menschen zu gefährlich, zu kompliziert, zu schwer, zu schmutzig oder auch zu eintönig sind, auch um Zeit und Kosten zu sparen. Speziell im Automobilbau sind sie längst eine tragende Säule in allen Bereichen der Produktion. In den letzten Jahren haben sie sich auch in anderen Branchen angeschickt, als Teil des Maschinenparks unverzichtbar zu werden. Die voranschreitende softwaretechnische Integration der Knickarm-Kollegen in Gesamtautomatisierungslösungen nimmt Maschinenbauern und Produktionsmittelplanern die Scheu vor ihrer ‚fremden‘ Bewegungslogik. x-technik AUTOMATION widmet zum vierzigsten Geburtstag des modernen elektrisch angetriebenen sechsachsigen Knickarmroboter den folgenden Heftteil der Robotik, die wie kaum eine andere maschinenbauliche Entwicklung die industrielle Produktion verändert hat. Autor: Ing. Peter Kemptner / x-technik

Das Wort ‚Roboter‘ stammt vom slawischen Wort ‚robot‘ für Arbeit ab, das als ‚die Robot‘ für die von Bauern für Feudalherrn als Naturalsteuer unentgeltlich zu leistende Fronarbeit auch hierzulande in Verwendung war. Erstmals verwendet wurde der Begriff 1921 vom tschechischen Science-Fiction-Autor Karel Čapek in seinem Theaterstück R.U.R. für in Tanks gezüchtete menschenähnliche künstliche Arbeiter. Heute würde man künstliche Menschen nach dem klassischen Muster des Golem als Androiden, im Fall rein mechatronischer Gebilde als humanoide Roboter bezeichnen.

(Mögliches Einstiegsbild ohne Text. Wenn zu wenig Platz vorhanden ist, können wir auch das übernächste Bild - in dem Fall mit Text - als Einstiegsbild verwenden.)
Was bin ich?
Bei Robotern für die industrielle Automatisierung handelt es sich laut Definition des Robot Institute of America um „umprogrammierbare, multifunktionale Manipulationswerkzeuge, die dazu dienen, Materialien, Teile, Werkzeuge oder spezialisierte Geräte anhand verschiedener vorprogrammierter Bewegungsabläufe zu bewegen, um eine Reihe von Aufgaben zu erledigen.“ Roboter brauchen eine spezifische Programmierung für die jeweilige Aufgabe. Im Gegensatz zu den Aufzügen von Ursa Minor Beta sind sie nicht so weit, den bevorstehenden Handlungsbedarf zu antizipieren. Dafür fühlen sie im Gegensatz zu Marvin, dem paranoiden Androiden aus dem Epos „per Anhalter durch die Galaxis“, keine Schmerzen und sind daher nicht wie dieser von Depression bedroht.
Eine Abgrenzung ist aber auch an anderen Stellen nötig. Einerseits ist ein Roboter wegen seiner eigenständigen, programmierten Arbeitsweise mehr als die handgesteuerten Manipulatoren für Aufgaben innerhalb radioaktiv gefährdeter Räume wie der von Raymond Goertz 1951 konstruierte Teleoperator-Arm, auch wenn diese den Ursprung der Industrieroboter-Kinematiken darstellen. Kein Roboter ist auch der 1769 von Wolfgang von Kempelen konstruierte Schachroboter, denn er wurde von einem im Gehäuse versteckten menschlichen Spieler gelenkt, war also – das Wort kommt möglicherweise hiervon – getürkt.

Industrieroboter wie der 1961 auf den Markt gebrachte Unimate wurden ursprünglich für den Automobilbau geschaffen. Mit numerischer Steuerung ausgestattet, wird er von vielen als erster echter Industrieroboter betrachtet.
Verbreitung durch Elektrifizierung
Als Erfinder des Industrieroboters gilt George Devol, der 1954 einen programmierbaren Manipulator zum Patent anmeldete. Mit Joseph F. Engelberger gründete er 1956 mit Unimation die allererste Robotikfirma. Konkurrent Planet Corporation brachte 1959 den ersten kommerziell verfügbaren Industrieroboter auf den Markt, allerdings mittels Kurvenscheiben und Endschalter mechanisch gesteuert. Deshalb betrachten viele den 1961 auf den Markt gebrachten Unimate mit numerischer Steuerung als ersten echten Industrieroboter.
Seit Ende der 1960er Jahre massiv in der Automobilindustrie eingesetzt, hatten die ersten Industrieroboter Hydraulikzylinder als Antriebsquellen. Der Schritt zur elektrischen Antriebstechnik mit Mikroprozessorsteuerung erfolgte vor 40 Jahren, als KUKA 1973 mit dem Famulus den weltweit ersten Industrieroboter mit sechs elektromechanisch angetriebenen Achsen auf den Markt brachte. Bereits ein Jahr später folgte ASEA (jetzt ABB), heute werden Roboter fast ausschließlich so gebaut.
Dieser technologische Wandel war auch entscheidend an der beschleunigten Verbreitung von Robotern beteiligt. Glaubte das amerikanische Wirtschaftsmagazin ‚Business Week‘ noch im Jahr 1972, dass weltweit die Zahl der Roboter bis 1980 nur auf 20.000 anwachsen würde, wurden in den 50 Jahren von 1961 bis 2011 tatsächlich 2,3 Millionen Industrieroboter installiert, davon rund 166.000 allein im Jahr 2011.

Zusätzliche Flexibilität und eine bedeutende Erweiterung der Einsatzmöglichkeiten brachte mit sechs Bewegungsachsen und elektrischem Antrieb vor genau 40 Jahren der KUKA Famulus. Seine Grundbauweise hat sich weitgehend durchgesetzt und bis heute erhalten.
Intelligenz am Arbeitspunkt
Die frei programmierbaren Bewegungen und Greifoperationen, die oftmals nicht starr vorgegeben sind, sondern flexibel auf Input von Sensoren reagieren und so den Roboter von reinen Handhabungsautomaten unterscheidet, eröffneten diesem ein breites Anwendungsspektrum weit über die ursprünglichen Aufgaben im Karosseriebau hinaus. Die fortschreitende Miniaturisierung der Elektronik und damit einhergehend die rasante Erhöhung der Leistungsfähigkeit von Steuerrechnern, Kommunikations- und Bildverarbeitungssystemen sowie Antriebssteuergeräten schufen Möglichkeiten zur Erhöhung von sowohl Geschwindigkeit als auch Präzision. Sie schufen aber auch die Möglichkeit, durch immer vielseitigere, komplexere und oft programmierbare Greifer- und Werkzeugsysteme eine wachsende Zahl unterschiedlicher Arbeitsgänge von Robotern ausführen zu lassen.

Längst haben Roboter die Fabrikhallen verlassen und werden auch anderweitig genutzt. So etwa als Kunstinstallation 'Outrace' von Clemens Weisshaar und Reed Kram anlässlich des Londoner Design Festivals im September 2010. Auf dem Trafalgar Square konnten Passanten sieben von Audi geliehene Roboter steuern, um mit Lichtquellen Nachrichten zu schreiben oder die Olympischen Ringe in die Luft zu zeichnen.
Mehrfache Integration
Industrieroboter durchliefen und durchlaufen einen Integrationsprozess. Wurden sie ursprünglich fast ausschließlich ‚reinrassig‘ in Roboter-affinen Produktionsprozessen eingesetzt, so findet immer häufiger ein Mischbetrieb mit Werkzeugmaschinen statt, in manchen Fällen sogar als Teil von diesen. Dieser Integrationsdruck führt zu Methodenwechseln in der Programmierung: Das Teachen ist längst unmodern geworden, Roboter lassen sich mittels Planungssoftware simulationsgestützt offline programmieren. Zwischen Steuerungen namhafter Hersteller und Robotersteuerungen wurden Schnittstellen entwickelt und es werden bereits Konzepte umgesetzt, in denen die Roboter-Kinematik mit der maschinen- oder produktionslinienweit einheitlichen Motion Control Technologie angesteuert wird.
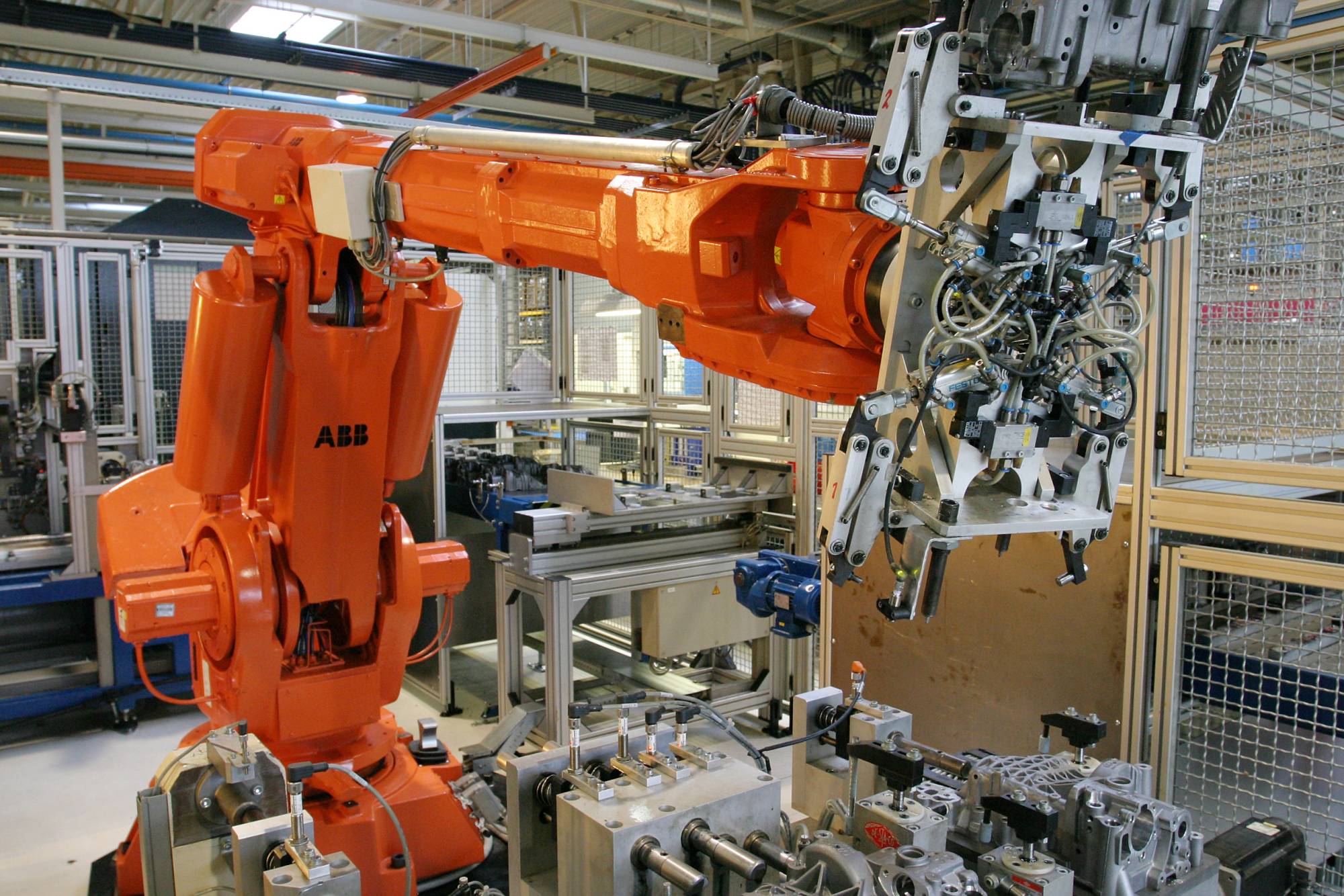
(nur wenn Platz ist) Wesentlich gestiegen ist die Komplexität der Greifer und Werkzeugsysteme und damit des Gesamtsystems Roboter

(wenn Platz ist) Die Integration in Fertigungsprozesse geht zunehmend tiefer, sei es durch Integration von Roboterkinematiken in Werkzeugmaschinen, sei es wie im Fall des Bearbeitungszentrums Robmill von Fill durch die Übernahme zerspanender Bearbeitungsaufgaben.
Ausbruch aus den Käfigen
Integration ist auch das Thema von Bestrebungen, die Zusammenarbeit zwischen Menschen und Robotern im gemeinsamen Prozess zu erleichtern, ohne bei der Sicherheit Kompromisse einzugehen. Fernziel ist, die Roboter aus ihren Käfigen zu befreien. Vor allem die Unberechenbarkeit menschlicher Handlungen macht diese Aufgabe nicht leichter. Erste Schritte sind jedoch bereits gesetzt, etwa durch die sichere Begrenzung der Geschwindigkeit nicht nur einzelner Achsen, sondern auch des Roboterkopfes. Das ermöglicht als ersten Schritt einen sicheren Einrichtebetrieb und eine rasche Rückkehr in den schnellen Serienbetrieb ohne Produktivitätsverlust.
Obwohl Roboter unser tägliches Leben nicht so stark beeinflussen, wie es die Science-Fiction-Autoren vorhergesagt haben, sind sie aus unseren Fabrikhallen längst nicht mehr weg zu denken. Ihre Zukunft – auch durch Diversifizierung in neue Geometrien und Kinematiken – ist gesichert.
Teilen: · · Zur Merkliste