anwenderreportage
Schunk BSWS Backenschnellwechselsystem: Kistenschleppen ade
Greifsystemlösung entlastet Mitarbeiter bei Palettieraufgaben in Galvanikbetrieben Zwischen 15 und 50 kg bringen die Transportbehälter auf die Waage, die Mitarbeiter in Galvanikbetrieben Tag für Tag oft mühsam herumwuchten müssen. Damit soll nun Schluss sein, sagt Michael Ludy, Geschäftsführer und Inhaber der Ludy Galvanosysteme GmbH, und entwickelte im Kundenauftrag eine Palettieranlage für Galvanikbetriebe. Ein Roboter mit speziell für die Anwendung konstruierten Schunk Greifsystemen übernimmt künftig bei Kunden von Ludy die Depalettierung schwerer Transportboxen. Mit minimalem Rüstaufwand lassen sich unterschiedlichste Systembehälter aus Metall oder Kunststoff automatisiert handhaben.
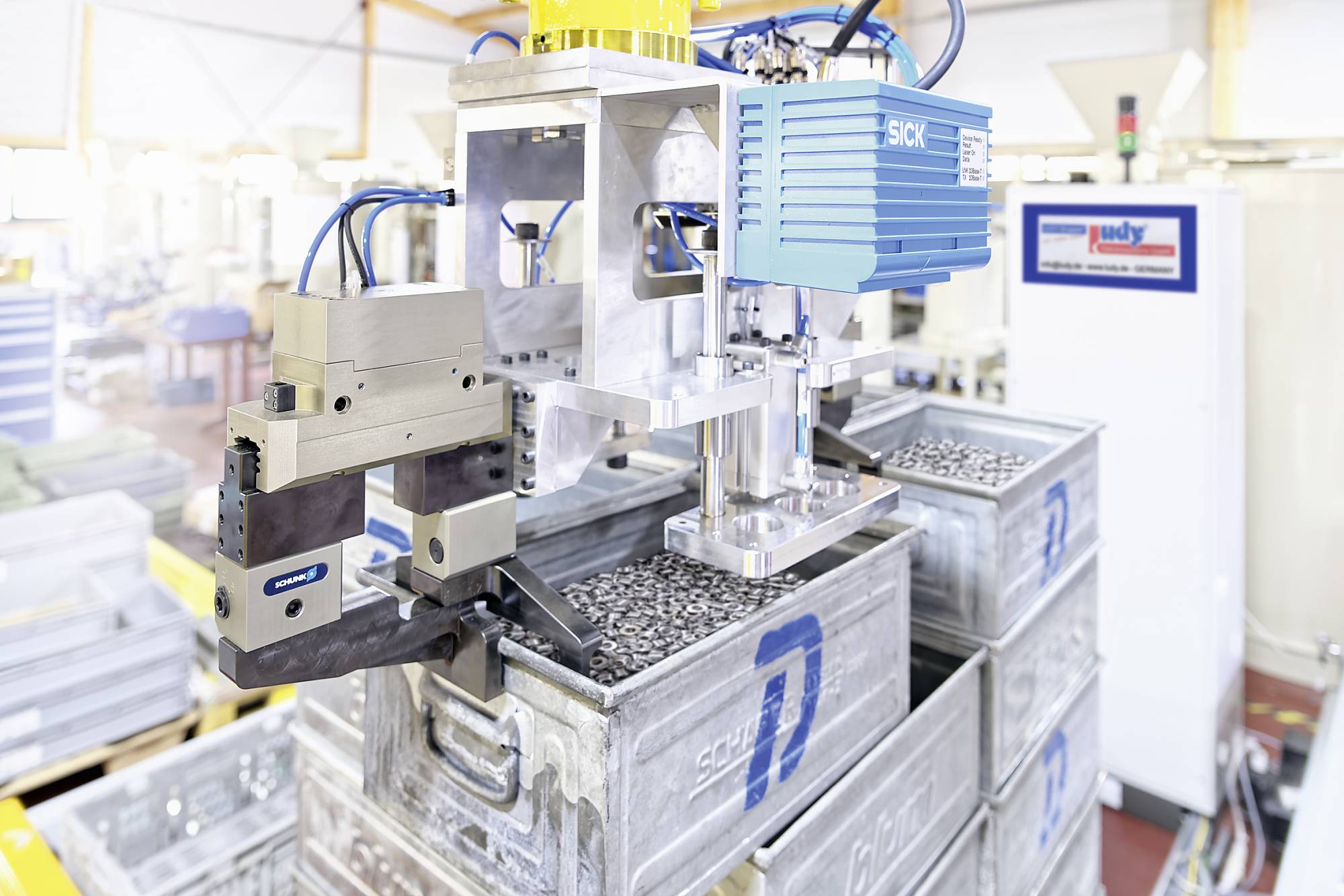
Die Behälter stehen Stoß an Stoß auf der Palette. Beim Start-Vorgang wird daher die erste Kiste jeder Lage zunächst so aus dem Stapel gezogen, dass der zweite Greifpunkt freigelegt ist. (Bild: Schunk)
Shortcut
(h3)Aufgabenstellung:
Entwicklung einer Palettieranlage für die automatisierte Wuchtung von 15 bis 50 kg schwere Transportbehälter.
(h3)Lösung:
Ein Roboter mit speziell für die Anwendung konstruierten robusten Greifsystemen von Schunk übernimmt die Depalettierung schwerer Transportboxen.
(h3)Vorteil:
Mitarbeiterentlastung durch automatisierte Handhabung; minimaler Rüstaufwand für die variantenreiche Handhabung unterschiedlichster Systembehälter; Robustheit des Systems; top Preis-Leistungsverhältnis; Möglichkeit zur einfachen Ansteuerung ohne mechatronisches Know-how.
Seit Jahren schon entwickelt der Kompetenzführer für Greifsysteme und Spanntechnik Schunk Greiferlösungen zum variantenreichen Palettieren und Depalettieren unterschiedlicher Güter. In der Regel geht es um klassische Kartonverpackungen aus dem Food- und Nonfood-Sortiment des Lebensmittelgroß- und -einzelhandels, der Kunststoff- oder Zulieferindustrie. Grund genug für die Ludy Glavanosysteme GmbH aus dem rheinland-pfälzischen Vinningen, den Greifer-Spezialisten mit der Entwicklung eines Greifsystems für schwere Transportbehälter zu beauftragen. „Der Trend zum automatisierten Teilehandling in Galvanikbetrieben nimmt seit 2014 spürbar an Fahrt auf“, berichtet Michael Ludy, der das Unternehmen seit seiner Gründung im Jahr 1990 leitet. „Zunächst stand vor allem die automatisierte Gestellbestückung im Vordergrund, wofür wir sukzessive das erforderliche Know-how aufgebaut haben. Angeregt durch diese Lösungen geht es nun um die nächste Stufe der Automation an: Die Handhabung von Transportbehältern mit Massenware für die Trommelgalvanik.“
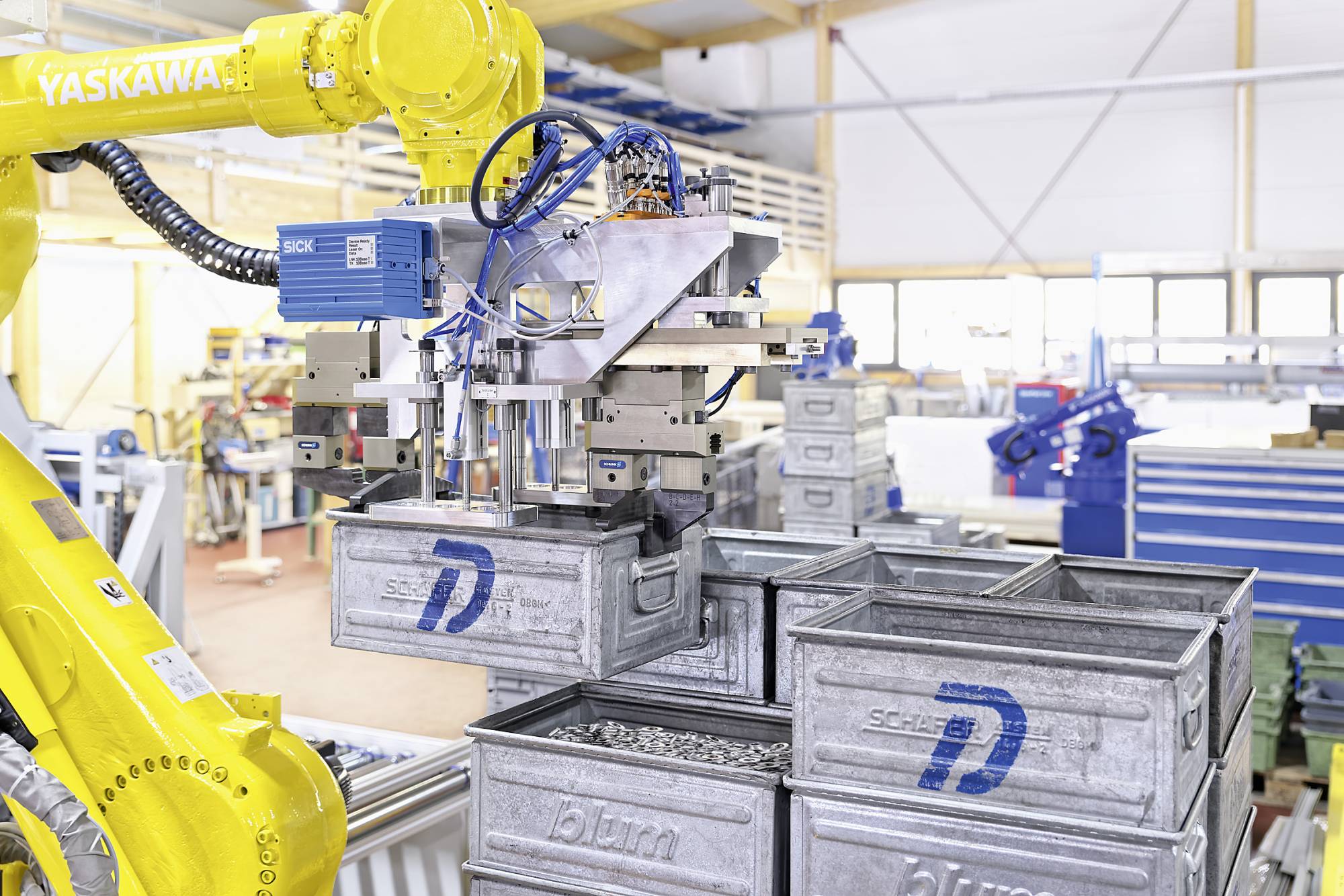
Sobald beide Seiten der Kiste frei zugänglich sind, nimmt das Greifsystem die komplette Box auf. (Bild: Schunk)
Felix Meyer
Leiter Automationsprojekte bei Ludy.
„Die größte Herausforderung war es, die sechs unterschiedlichen Kistentypen zu handhaben, ohne mehrere Greifer einzusetzen.“
Ergonomie steht im Vordergrund
Bei der Anwendung handelt es sich bislang um einen echten Knochenjob: Im Dreischichtbetrieb depalettieren Mitarbeiter die Transportbehälter und stellen sie auf einen Rollenförderer, von dem aus die Behälter entleert und über einen Befüllbunker kontinuierlich in den Galvanisierprozess eingeschleust werden. Pro Minute müssen zwei Kisten von Hand depalettiert und zwei leere Kisten palettiert werden. Die Transportbehälter – 20 unterschiedliche Varianten an der Zahl – unterscheiden sich in Größe, Gewicht und Beschaffenheit. Vergleichsweise steife Kisten aus Stahlblech sind ebenso dabei wie eher labile Kunststoffbehälter. Einzig die Tatsache, dass die Paletten stets sortenrein bestückt sind, vereinfachte die Aufgabe. Felix Meyer, bei Ludy Galvanosysteme verantwortlich für Automationslösungen, nahm die Herausforderung an und realisierte in enger Abstimmung mit dem Roboter- und Sensorhersteller sowie mit den Greifsystemspezialisten von Schunk eine ebenso intelligente wie robuste Roboterzelle, die fortan das Handling der Kisten übernimmt.

Die Dimension der einzelnen Behälter wird ausschließlich über die Backenfinger und deren Kontur definiert, das heißt das Stichmaß des Greifers bleibt unverändert. (Bild: Schunk)

Michael Ludy
Inhaber und Geschäftsführer von Ludy.
„Der Trend zum automatisierten Teilehandling in Galvanikbetrieben nimmt seit 2014 spürbar an Fahrt auf.“
Speziell entwickelte Greifstrategie
Herzstück ist eine individuell entwickelte, pneumatisch gesteuerte Greifsystemlösung, die in Kombination mit einer speziell für die Anwendung ausgearbeiteten Greif- und Schnellwechselstrategie ein variantenreiches Handling ermöglich. Um die Komplexität der Aufgabe zu reduzieren, konzentrierten sich die Schunk-Konstrukteure in Abstimmung mit Ludy zunächst auf die sechs meistgenutzten Behältervarianten. Diese werden vom Mitarbeiter auf Paletten (Gesamtgewicht bis zu 1,5 t) per Stapler angeliefert, vom Roboter einzeln depalettiert und auf dem Rollenförderer abgestellt. Nach dem automatisierten Entleeren in einen Befüllbunker greift der Roboter die leeren Kisten vom Rollenförderer und stapelt sie auf eine Leerbehälterpalette. Um die Kisten zu identifizieren und einen präzisen Zugriff zu gewährleisten, ist das Greifsystem mit einem Lasermesssystem ausgestattet. Per Scanner werden die Art und Position der Transportbehälter (X, Y- und Z-Koordinaten sowie Winkel) erfasst, als Datenpaket an die Anlagensteuerung des Galvanikbetriebs übergeben und dort auf Plausibilität und Machbarkeit überprüft. Stimmen alle Parameter mit den vorgegebenen Werten überein, beginnt der Roboter mit dem Abstapeln.
Hierfür hat Schunk im Rahmen einer Voruntersuchung eine spezielle Greifstrategie entwickelt: Ähnlich wie es auch ein Werker manuell macht, wird die jeweils erste Kiste einer Lage mit einem Greifer des Handhabungssystems am Rand gegriffen und je nach Kistentyp rund 200 mm bis 300 mm horizontal nach vorne gezogen. Auf diese Weise wird der zweite Greifpunkt am gegenüberliegenden Kistenrand frei zugänglich, so dass der Behälter anschließend mit beiden Greifern des Systems gegriffen, per Roboter verfahren und auf dem Rollenförderer abgesetzt werden kann. Für die zuverlässige Funktion ist einzig die Anordnung der Lagen auf der Palette vorgegeben: zwei Kisten längs, drei Kisten quer. Die Ausrichtung der Palette oder ein eventueller Überstand der Behälter über den Palettenrand hingegen führen nicht zu einer Beeinträchtigung des Ablaufs, da über den Laserscanner zunächst stets die Gesamtsituation der einzelnen Lage erfasst und ausgewertet wird. Zusätzlich scannt das System vor jedem Zugriff die einzelne Kiste. Auf diese Weise ist sichergestellt, dass stets die aktuelle Position erfasst ist, selbst wenn sich Kisten beim Depalettieren ineinander verhaken sollten und einzelne Kisten ihre Position verändern.

Niederhalter an den Längsseiten gewährleisten bei dynamischen Fahrten einen sicheren Halt. (Bild: Schunk)
Infos zum Anwender
Die Ludy Galvanosysteme GmbH aus Vinningen ist spezialisiert auf die Konzeption und Herstellung von Galvanikanlagen für Leiterplatten, Oberflächenveredelung, Korrosionsschutz, Mikroelektronik und Medizintechnik. Der global agierende Mittelständler beschäftigt 18 Mitarbeiter. Der Geschäftsführer und Ideengeber Michael Ludy verfügt über mehr als 36 Jahre Erfahrung im Sondermaschinenbau und der Automatisierungstechnik für Galvanosysteme.
www.ludy.de
Zugänglichkeit und Variantenvielfalt als Herausforderung
Die von Schunk konstruierte, besonders robuste Greifsystemlösung besteht aus zwei vielzahngeführten SCHUNK PGN-plus 160 Universalgreifern, einer Hubachse, die einen kollisionsfreien Zugriff der zweiten Kistenseite ermöglicht, und zwei Niederhaltern. Letztere stellen während des Handlings sicher, dass der gefüllte Behälter auch bei dynamischen Beschleunigungs- und Bremsbewegungen nicht kippt und permanent zuverlässig gegriffen bleibt. Mit ihrer Hilfe lassen sich auch verwindungsanfällige Kunststoffboxen prozesssicher handhaben. Der eigentliche Greifvorgang erfolgt beim ersten Greifpunkt ausschließlich von außen, sprich der innenliegende Greiferfinger ist feststehend montiert und nur der äußere Finger fährt zu. Der zweite Greifer wiederum ist auf einer Schienenführung platziert, auf der er mithilfe eines Pneumatikzylinders verfahren werden kann, um bei der jeweils ersten Kiste einer neuen Lage Kollisionen zu verhindern. Sobald der erste Greifer geschlossen und die Kiste nach vorne gezogen ist, fährt der zweite Greifer auf Anschlag, dann in Z-Richtung nach unten, wo er schließlich den gegenüberliegenden Kistenrand zentrisch greift. Zur Handhabung der nachfolgenden Kisten einer Lage muss der zweite Greifer anschließend nicht mehr über den Pneumatikzylinder verfahren werden, da stets beide Greifpunkte jedes Behälters frei zugänglich sind.

Die Behälter werden vom Roboter auf einem Rollenförderer platziert, von dem sie vollautomatisiert dem Galvanisierprozess zugeführt werden. (Bild: Schunk)
Schneller Fingerwechsel statt Greiferbahnhof
„Die größte Herausforderung war es, die sechs unterschiedlichen Kistentypen zu handhaben, ohne mehrere Greifer einzusetzen“, unterstreicht Felix Meyer. „Letztlich haben wir uns für einen manuellen Backenwechsel entschieden. Das ist durchaus praktikabel, denn alle sechs Varianten werden mit insgesamt nur drei Backensätzen abgedeckt.“ Die Konzeptentwicklung und Auslegung der Finger hat Felix Meyer komplett Schunk überlassen. „Mir war es wichtig, dass das Experten machen, die im Bereich Greifen das größte Know-how haben“, so der Maschinenbautechniker. In aufwändiger Detailarbeit hat Schunk anhand der unterschiedlichen Behältermuster Gemeinsamkeiten definiert und die Greiferfinger schließlich so ausgelegt, dass mithilfe des SCHUNK BSWS Backenschnellwechselsystems innerhalb weniger Sekunden zwischen den einzelnen Varianten geswitcht werden kann. Im Rahmen der Untersuchungen bei Schunk wurde klar, dass nur ein Zugriff von außen zum Ziel führt, da dann bei allen Kistenvarianten der für ein sicheres Handling erforderliche Formschluss erzielt werden konnte. Eine allein reibschlüssige Lösung wäre nicht realisierbar gewesen, da es dann aufgrund der hohen Greifkräfte zu einer starken Deformation der Behälter gekommen wäre. Über die Konstruktion der Backen und den Pneumatikdruck ist zudem sichergestellt, dass die Kisten nicht deformiert oder gar beschädigt werden. Das Greifsystem wurde von Schunk komplett vormontiert und anschlussfertig mit offenen Kabeln und offenem Schlauch an Ludy geliefert. Den Laserscanner, Ventile und Ausleger wiederum hat das Team bei Ludy in Eigenregie gestellt und montiert. In einem nächsten Schritt will man die Automationslösung für weitere Behältervarianten fit machen.
Bei der Umsetzung des Konzepts wurden Michael Ludy (Mitte) und Felix Meyer (li.) von Schunk-Fachberater Michael Leineweber (re.) unterstützt. (Bild: Schunk)
Mechatronische Lösung als Alternative?
Gegenüber einer mechatronischen Lösung, die von Schunk im Rahmen der Ideenfindung als Alternative untersucht worden war, überzeugt das realisierte Greifsystem durch seine hohe Robustheit, ein hervorragendes Preis-Leistungsverhältnis und die Möglichkeit zur einfachen Ansteuerung ohne mechatronisches Know-how. Je filigraner die Lösung, je variantenreicher das Stichmaß, je dosierter die Greifkräfte und je mehr Daten aus dem Handhabungsprozess ermittelt werden sollen, desto mehr spräche nach Aussage von Schunk für eine mechatronische Lösung. Letztlich gelte es, stets die unterschiedlichen Aspekte gegeneinander abzuwägen, um jeweils das Optimum für die einzelnen Anwendungen zu realisieren.
Großes Interesse bei Kunden
Mit dem Konzept hat Ludy Galvanosysteme bei seinen Kunden offenbar voll ins Schwarze getroffen: “Beim Tag der offenen Tür hatten sich viele für das System interessiert, obwohl es zu diesem Zeitpunkt noch gar nicht komplett montiert war. Offenbar besteht ein großes Interesse an der automatisierten Handhabung schwerer Behälter“, berichtet Michael Ludy. Bei aller Begeisterung gelte es dennoch, realistisch zu bleiben: „Demolierte Kisten werden sich mit dem System auch künftig nicht zuverlässig handhaben lassen. Zudem sollten Anwender zu einer gewissen Vereinheitlichung ihrer Transportbehälter kommen, wenn sie auf einen solchen werkerlosen Betrieb umstellen wollen“, betont der Inhaber.
Teilen: · · Zur Merkliste