anwenderreportage
Schnellwechselsysteme von Schunk unterstützen bei einer roboterbasierten Forschungsanlage
Digitale Fabrikationsmedien im Bauwesen: In einer roboterbasierten Forschungsanlage der Universität Stuttgart sind flexible und robuste Roboter-Schnellwechselsysteme SWS-L von Schunk im Einsatz. Sie tragen maßgeblich dazu bei, digitalisierte Fertigungsprozesse im Bauwesen zu unterstützen und damit mehr Effizienz und Produktivität zu erreichen. Bemerkenswert ist das mobile Konzept der Anlage, das Handwerks- und Baubetriebe nachhaltig umgestalten wird.
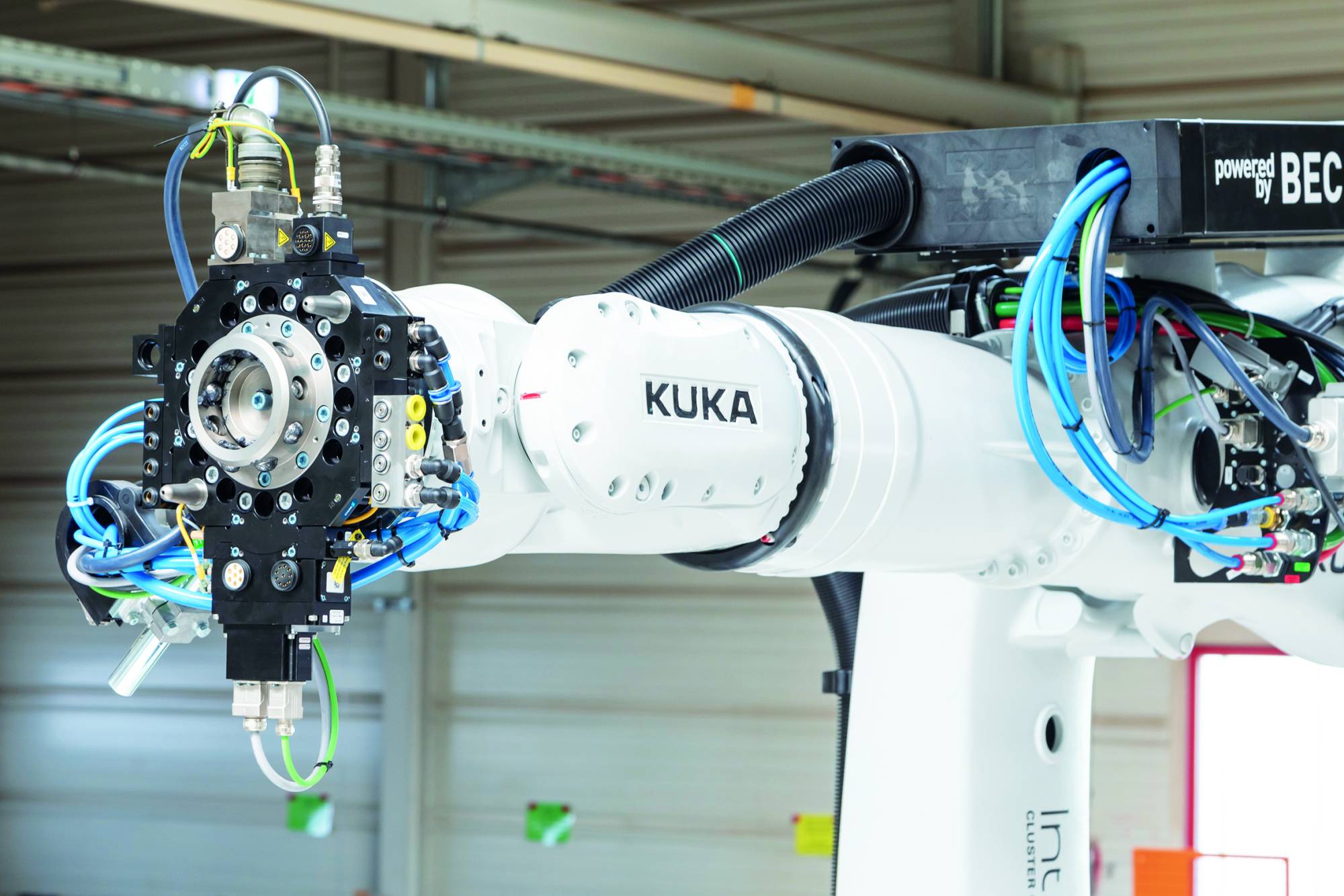
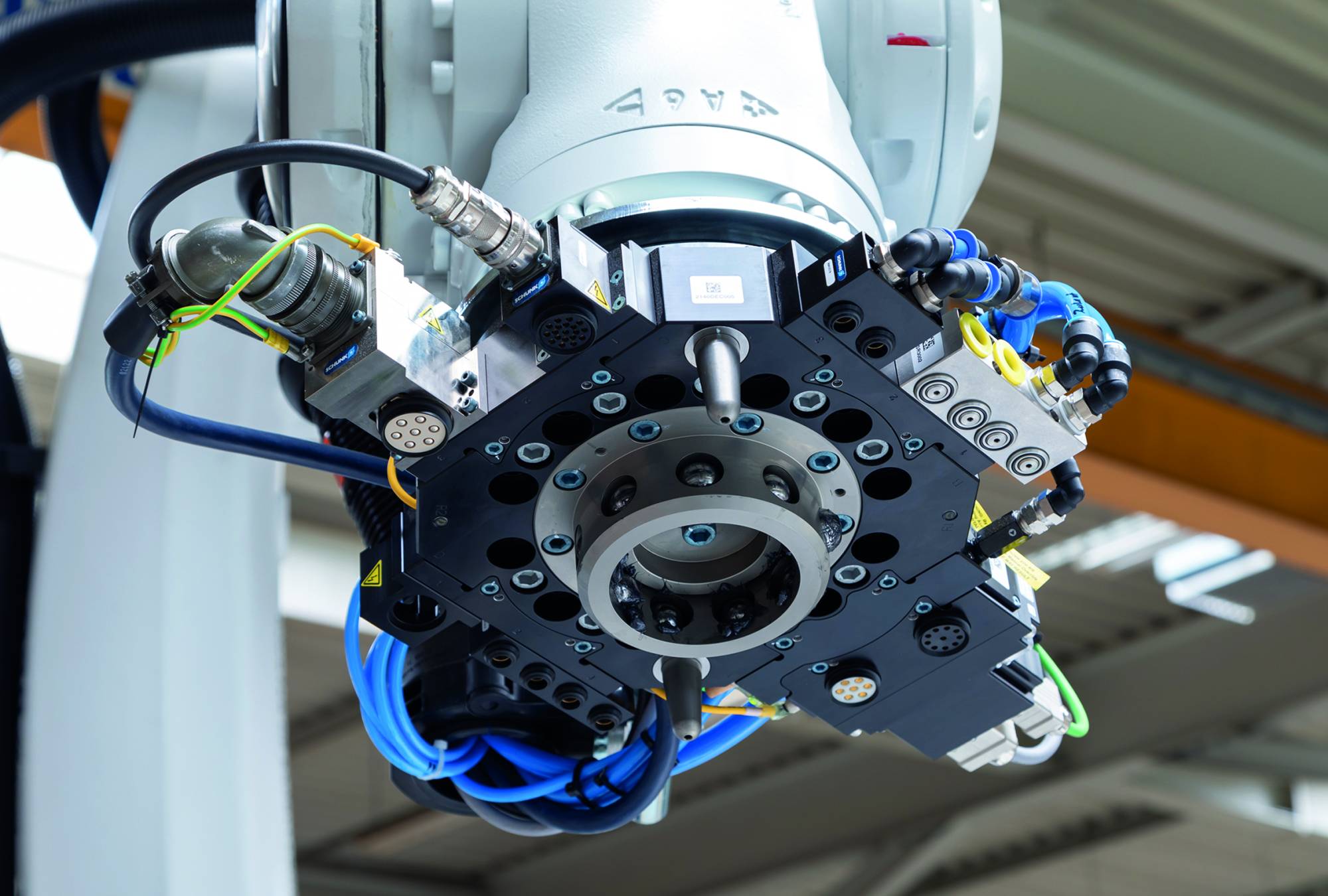
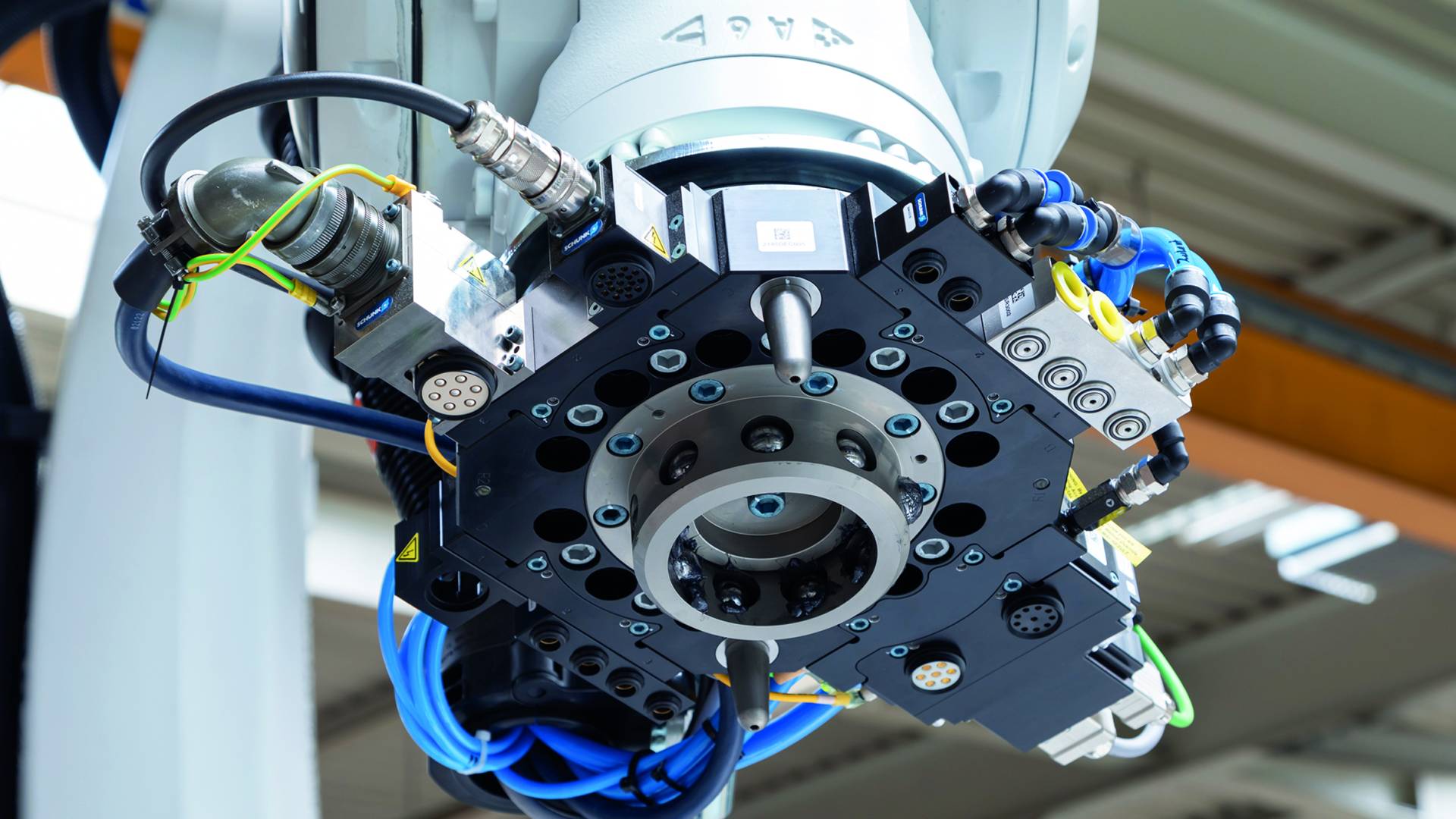
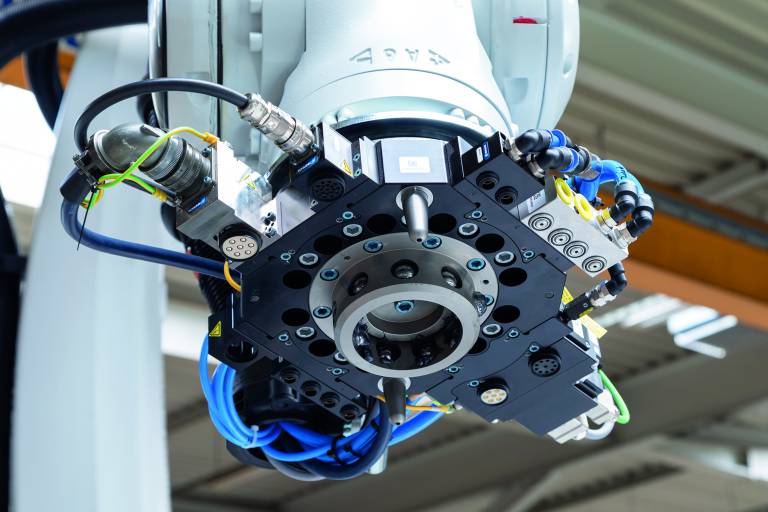
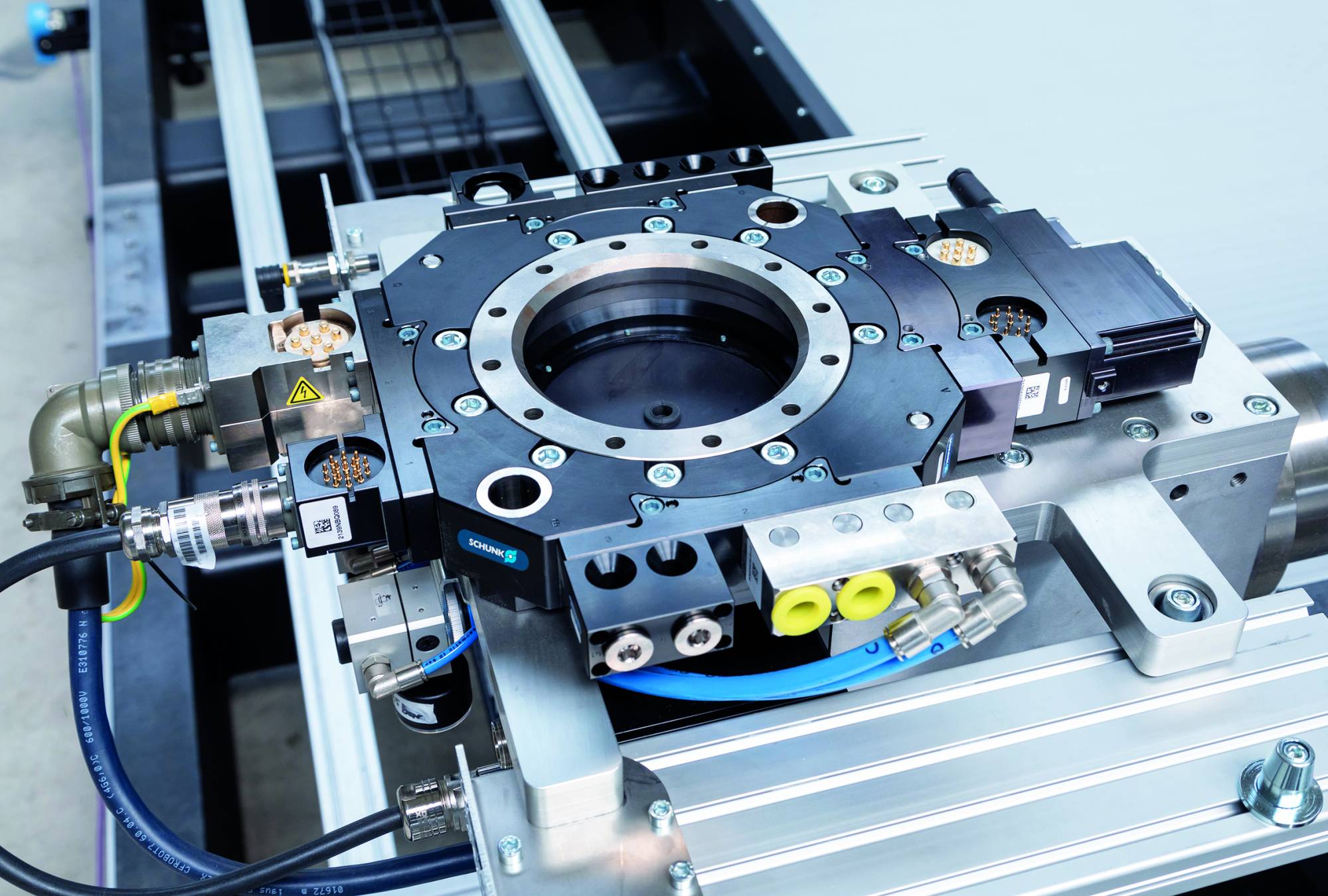
Herzstück der Anlage ist das Schnellwechselsystem SWS-L, mit dem der Roboter jegliche Endeffektoren automatisch aufnehmen und ablegen kann. (Bilder: Schunk)
Shortcut:
Anforderung: Das Potenzial digitaler Technologien für Design, Fertigung und Konstruktion im Bauwesen ausschöpfen.
Lösung: Flexible und robuste Roboter-Schnellwechselsysteme SWS-L von Schunk sind in der Anlage im Einsatz.
Nutzen: Digitalisierte Fertigungsprozesse im Bauwesen unterstützen und mehr Effizienz und Produktivität erreichen. Das mobile Konzept der Anlage sorgt für Flexibilität.
Bis 2050 werden neue Wohnräume, Arbeitsplätze und Infrastruktur für 2,6 Milliarden Menschen benötigt, getrieben durch das Bevölkerungswachstum und die schnell fortschreitende Urbanisierung. Somit sucht die Bauwirtschaft neue Lösungen, um sich für die Zukunft zu rüsten. Wie? Vor allem durch den vermehrten Einsatz digitaler Technologien und durch Automatisierung. Schunk gestaltet diesen Prozess durch Roboter-Schnellwechselsysteme aktiv mit. So richtete die Universität Stuttgart 2019 einen neuen Exzellenzcluster namens „Integratives Computational Design and Construction for Architecture“ (IntCDC) ein. Die Vision dieses von der Deutschen Forschungsgemeinschaft (DFG) geförderten Projekts ist es, das Potenzial digitaler Technologien für Design, Fertigung und Konstruktion im Bauwesen zu nutzen. Die Interdisziplinarität aus Architektur, Bauingenieurwesen, Bauphysik, Ingenieurgeodäsie, Fertigungs- und Systemtechnik, Computer- und Automatisierungstechnik soll neue Ansätze hervorbringen.
Im Bild: der pneumatische Schnellwechseladapter SWA.
Schnellwechselsysteme SWS und SWS-L
Für den automatischen Wechsel des Endeffektors am Roboter, zum Beispiel Greifer, Paletten, Saugspinnen, pneumatische oder elektrisch angetriebene Werkzeuge oder Schweißzangen, stellt Schunk pneumatisch betätigte Schnellwechselsysteme SWS beziehungsweise SWS-L als Schwerlastausführung zur Verfügung. Die komplette Baureihe mit 20 Baugrößen für Traglasten von einem bis 1.350 kg deckt ein breites Anwendungsspektrum ab. Das Schnellwechselsystem (SWS) besteht aus einem Schnellwechselkopf (SWK) und einem Schnellwechseladapter (SWA). Der am Roboter montierte SWK koppelt den am Werkzeug montierte SWA. Ein pneumatisch angetriebener Verriegelungskolben sorgt mit seinem patentierten Design für eine sichere Verbindung. Eine manuelle Notentriegelung ist möglich, da intern im Kolbenraum keine Federn verbaut sind. Alle Funktionsteile sind aus gehärtetem Stahl gefertigt. Im Gehäuse integrierte pneumatische Durchführungen ermöglichen eine sichere Energie- und Medienversorgung. Die „No-Touch-Locking-Funktion“ gewährleistet einen zuverlässigen Wechsel, auch wenn SWK und SWA sich nicht berühren, bis zu einem axialen Versatz von 3 mm. Durch die hohe Wiederholgenauigkeit von 0,015 mm sind Präzision und Zuverlässigkeit sichergestellt. Für vielfältige Energie-Übertragungsmöglichkeiten bietet Schunk ein breites Sortiment an Elektro-, Pneumatik- und Fluidmodulen. Eine Kodierung der Adapter ist über eine Steckverbindung möglich. Ein ISO-Flanschbild sorgt für die einfache Montage an die meisten Robotertypen ohne zusätzliche Adapterplatten.
Digitale Technologien im Einsatz
„Ziel des Clusters ist es, mit digitalen Technologien methodische Grundlagen für ein Umdenken des Entwurfs- und Bauprozesses zu schaffen, die im urbanen, sich verdichtenden Raum lebenswerten und bezahlbaren Wohnraum schaffen. Im Fokus der hier eingesetzten Roboteranlagen stehen die Vorfabrikation weitgespannter Faserverbundgroßbauteile und mehrstöckiger Gebäude aus Holz“, erläutert Dr. Felix Amtsberg, Koordinator der Holzplattform am IntCDC an der Uni Stuttgart. „Unser Ansatz ist es, digitale Fabrikationsmedien, etwa CNC-Maschinen und die Robotik, als kreative Entwurfswerkzeuge mitzunutzen. Wir binden sie als Parameter für den architektonischen Entwurf gleich von Anfang an ein“, so Amtsberg. Als gelernter Tischler und studierter Architekt bringt er Aspekte des praktischen Handwerks mit den Randbedingungen aus Design, Technik und Forschung ideal zusammen.
Das Konzept: Die Anlage wird als mobile Fabrik als Standard an jene Orte des Baubetriebs geschickt, wo sie gebraucht wird.
Flexible Fertigungslösungen dank Roboteranlage
Gemeinsam mit dem Systemintegrator BEC entstand jüngst eine mobile, roboterbasierte Produktionsplattform, die Bauteile aus Holz bedarfsgerecht handhabt, bearbeitet und montiert. „Wir dürfen die Ideen, die die Wissenschaft hat, in konkrete Anlagen umsetzen“, erklärt BEC-Geschäftsführer Matthias Buck. „Hierzu bedienen wir uns geeigneter technischer Komponenten und Module, die alle Anforderungen in alle Richtungen erfüllen – sie müssen zuverlässig, flexibel und zukunftsfähig sein.“ So entstand als Kern des Forschungspakets eine Roboteranlage, die in toto als mobile Fabrik an einen Holzbaubetrieb, in eine Werkstatt oder an eine Baustelle geschickt wird. „Dort kann die Anlage je nach Bedarf und Anforderungen Handwerksarbeiten unterstützen – zum Beispiel größere Holzteile vor Ort zerspanen, montieren, leimbinden, kleben oder nageln“, sagt Buck. „Herzstück der Anlage ist das Schunk-Schnellwechselsystem SWS-L, mit dem der Roboter jegliche Endeffektoren automatisch aufnehmen und ablegen kann, zum Beispiel Greifer, Sägen oder Fräskopfe. Wir haben auf diese Schunk-Komponenten gesetzt, weil wir die Bus-Technologie, die im Wechselsystem selbst vorhanden ist, nutzen wollen, um die Verkabelung auf ein Minimum zu reduzieren“, so Buck.

Flexibel einsetzbar: Dort, wo die Anlage werken soll, wird sie auch hingefahren.
Zu sehen ist das Schnellwechseladapter SWA auf der Werkzeugablage.

Das Wechselsystem SWS-L, das bis zu 1.300 kg aufnehmen kann, ist die robuste Schnittstelle Endeffektor, hier ein Flächengreifer.

Matthias Buck
Gründer und Geschäftsführer von BEC
„Wir haben auf Schunk-Komponenten gesetzt, weil wir die Bus-Technologie, die im Wechselsystem selbst vorhanden ist, nutzen wollen, um die Verkabelung auf ein Minimum zu reduzieren.“
Leistungsfähigkeit durch Robotereinsatz
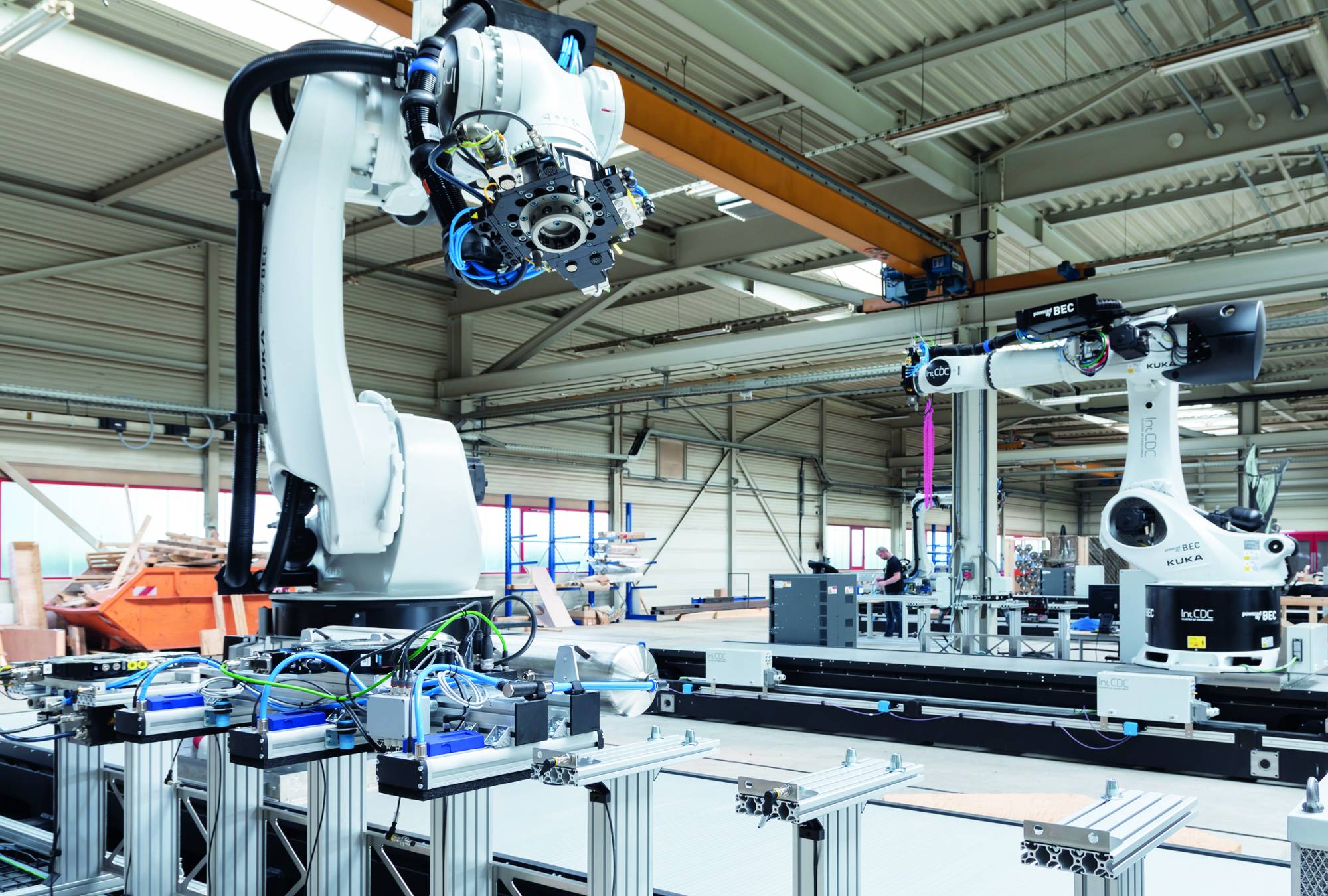
Die Ingenieure von BEC haben alle Module maximal ausgelegt, um die Forschung und die Weiterentwicklung des Projekts nicht zu begrenzen. Vielmehr soll die Anlage alle Optionen offenhalten für maximale Zukunftsfähigkeit. „Hier ist nichts auf Kante genäht“, sagt Buck. „Wir wollen mit der Anlage zunächst solide und zuverlässig das aktuelle Projekt umsetzen und auch künftige, neue Projekte realisieren.“ Der Roboter, ein Kuka KR420/R3330 mit 420 kg Traglast, verfährt auf einer BEC-Linearachse, der siebten Roboterachse, die fest in die Containerplattform integriert ist. Das Wechselsystem SWS-L von Schunk, das bis zu 1.300 kg aufnehmen kann, ist die robuste Schnittstelle zum Werkzeug. Auf die Leistungsfähigkeit der SWS-L kommt es vor allem bei Fräsarbeiten an, bei denen große Kräfte wirken. „Konkret haben wir am Wechselsystem eine Frässpindel und mehrere Flächengreifer mit einem Vakuumsystem im Einsatz, die größere Holzbauteile handhaben und zuführen“, sagt Amtsberg. „Es können aber auch andere Arbeitsprozesse eingebunden werden, denn die Werkzeuge sind über den Adapter beliebig austauschbar.“ Und es muss nicht Holz sein – die Anlage ist auch in anderen Gewerken einsetzbar. Das ganze System ist auf Adaptivität und Flexibilität ausgelegt – sowohl hinsichtlich des Materials, der Bearbeitung sowie des Ortes. Und es ist ausbaubar: So kann zum Beispiel künftig ein integriertes Visionsystem durch Umgebungs- und Endeffektorinspektion für Kollisionsfreiheit und Qualitätssicherung sorgen.
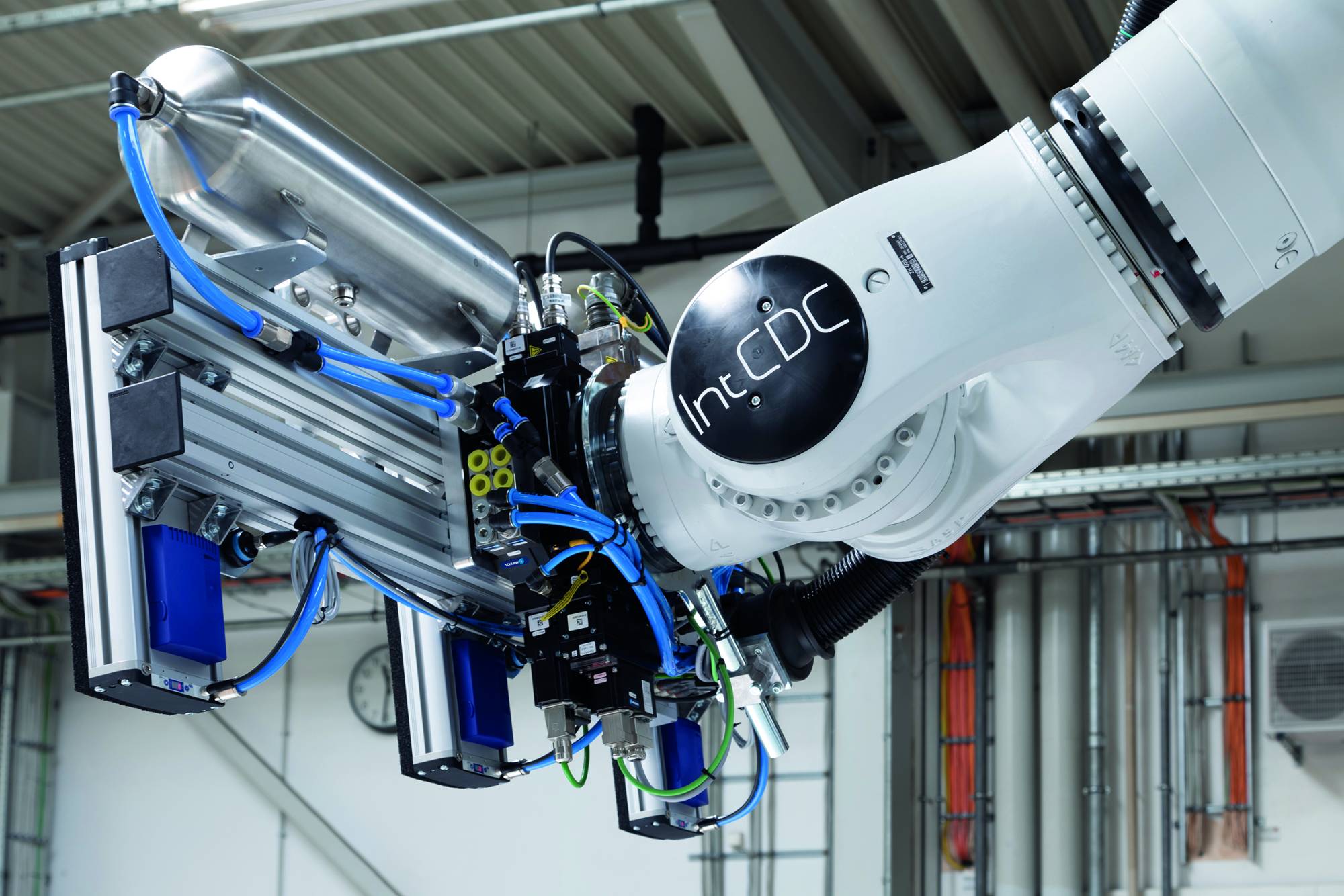
Der Flächengreifer am SWS-L im Einsatz.

Schunk-Schwerlastwechselsysteme SWS-L sind bei einem Forschungsprojekt, das künftig die Bauindustrie und Handwerker unterstützt, im Einsatz.

Dr. Felix Amtsberg
Koordinator der Holzplattform am IntCDC an der Uni Stuttgart
„Wir streben eine intelligente Zusammenarbeit der Robotik mit dem Werker im Handwerks- oder Baubetrieb an, um flexibler agieren zu können, als es bei einer vollständigen Automatisierung der Fall wäre.“
Mobile Containerplattform
Durch die Modularisierung der Anlage ist sie an jedem Ort einsetzbar, wo sie gebraucht wird – ohne sie demontieren zu müssen. Die Containerlösung lässt sich skalieren und zu Linien zusammenfassen je nach Anforderung des Bauprojekts und des konkreten Gewerks. So kann die Anlage auch Teil einer Produktionskette werden. „Wir streben eine intelligente Zusammenarbeit der Robotik mit dem Werker im Handwerks- oder Baubetrieb an, um flexibler agieren zu können, als es bei einer vollständigen Automatisierung der Fall wäre“, so Amtsberg. „Eines unserer nächsten Vorhaben ist es, dass der Roboter mit mehreren Teilnehmern im Baubetrieb zusammenarbeitet. Flexible Produktionsabläufe sollen mit technologischer Unterstützung für den Handwerker selbst koordinierbar sein, unter anderem auch mit Augmented Reality. Wir können uns gut vorstellen, dass die Anwendung von Digitalisierung und Automatisierung in der Werkstatt die Handwerksberufe für junge Leute wieder attraktiver macht“, hofft Amtsberg.
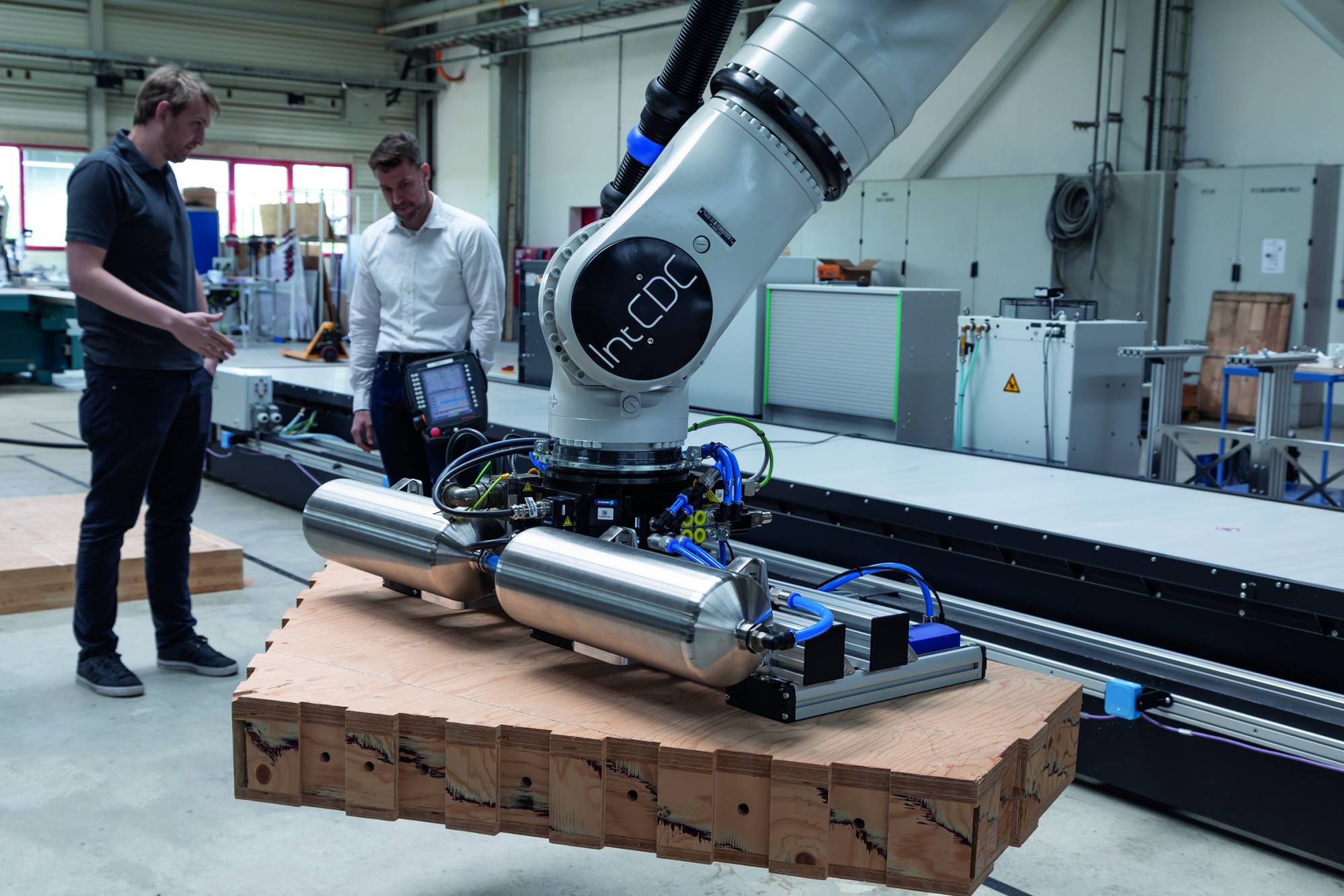
Das Werkstück, ein großformatiges Holzbauteil, ist aufgenommen und wird der weiteren Bearbeitung zugeführt.

Der Flächengreifer am SWS-L.
Das Projektteam: (v.l.) Benjamin Kaiser, Universität Stuttgart, Institut für Steuerungstechnik der Werkzeugmaschinen und Fertigungseinrichtungen, Matthias Buck, Geschäftsführer BEC, Dr. Felix Amtsberg, Universität Stuttgart, Leiter des Forschungsprojekts IntCDC, Jürgen Kolbus, Key Account Management, Schunk, sowie Gunther Kopp, Key Account Management Greifsysteme, Schunk.


Infos zum Anwender
Die Universität Stuttgart hat 2019 ihren neuen Exzellenzcluster Integratives computerbasiertes Planen und Bauen für die Architektur (IntCDC) gegründet. Mit einer Förderdauer von zunächst sieben Jahren ist ein Exzellenzcluster die bedeutendste und umfangreichste Förderung der Deutschen Forschungsgemeinschaft (DFG). Zum ersten Mal wurde ein Exzellenzcluster für das Fachgebiet Architektur vergeben. Der Exzellenzcluster IntCDC trägt dazu bei, ein international sichtbares Forschungszentrum zu etablieren.
Gezielte Automatisierungsexpertise
Die methodischen und interdisziplinären Erkenntnisse des Clusters sollen dazu führen, digitale Technologien umfassender zu nutzen und die Herausforderungen im Handwerk und Bauwesen zu bewältigen. Beispielsweise kann sich während der Planung bereits die Fertigbarkeit der Komponenten sichtbar machen lassen. Materialbezogene Roboterbauprozesse können neue Formen der Mensch-Maschine-Kollaboration maßgeblich prägen. „Hier ist für uns die Expertise von Schunk, was Automatisierung, Robotik und Handhabung angeht, sehr wichtig“, bekräftigt Buck. Und weiter: „Schnellwechselsysteme und andere Komponenten von Schunk haben wir dank ihrer Flexibilität bei diversen Projekten im Einsatz. Die technologische Verbindung zwischen Uni Stuttgart, BEC und Schunk existierte schon eine ganze Weile. Wir sind sehr zufrieden.“ Nun wird die mobile Bearbeitungsplattform als Forschungsanlage zum Holzbauer gebracht und dort in der realen Fertigung eingesetzt. IntCDC installiert und betreut die Anlage weiter. Über die Zeit werden sich unterschiedliche Nutzungsvarianten für den Handwerksbetrieb ergeben – er kann die Anlage kaufen oder mieten und sie der konkret anstehenden Materialbearbeitung in der Vorproduktion anpassen.
Teilen: · · Zur Merkliste