anwenderreportage
Gerichtsmediziner Dr. Robot
Wennn der Roboter Hand an den menschlichen Körper legt, ist Schunk im Spiel: Automatisierung findet nicht nur in der industriellen Fertigung statt. Am Institut für Rechtsmedizin der Universität Zürich werden bildgebende Diagnoseverfahren aus Medizin und Industrie zur Virtopsy (virtuelle Autopsie) kombiniert. Das dabei geschaffene 3D-Abbild des Getöteten und die minimalinvasive Entnahme von Gewebsproben ohne vollständige Öffnung der Leiche bilden die Grundlage für die Untersuchung von Todesursache und Tathergang. Zentrales Element der von der ACMIT GmbH in Wiener Neustadt entwickelten Diagnosestation ist Virtobot 2, ein Sechsachs-Roboter mit automatischem Wechsel der Diagnosegeräte. Dieser erfolgt ebenso wie das Greifen der Biopsienadeln mittels Roboterzubehör von Schunk. Autor: Ing. Peter Kemptner / x-technik
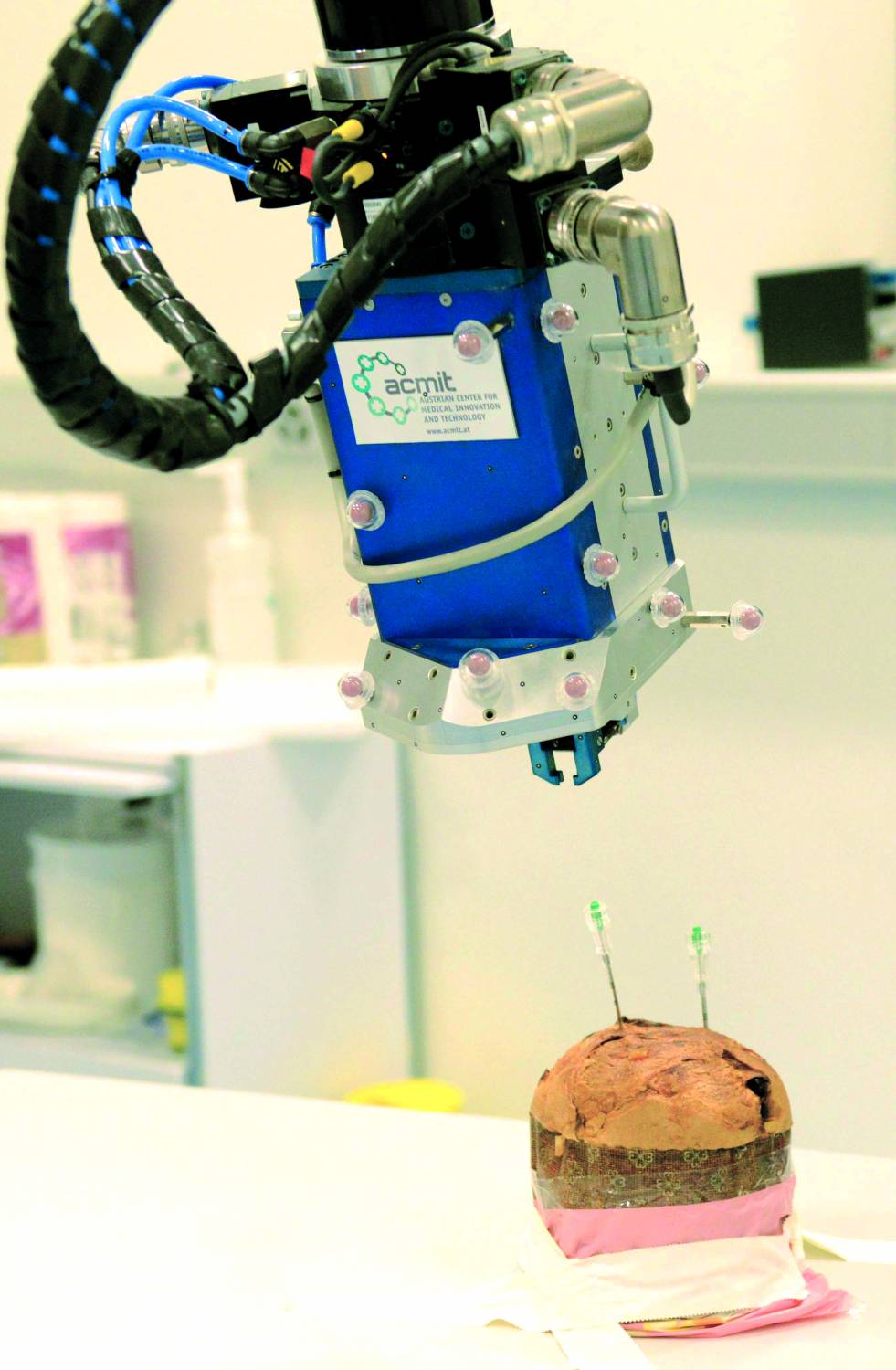
Die von ACMIT entwickelte Biopsieeinheit ist mit einem pneumatischen Kleinteilegreifer MPG Plus von Schunk ausgestattet. Damit holt der Roboter bis zu 10 Hohlnadeln aus einem Magazin und setzt sie an den passenden Stellen für die Entnahme von Gewebeproben.

Ing. Samuel Furthmayr
Vertriebsingenieur Schunk Intec GmbH
„Die Anwendung beweist die universelle Einsetzbarkeit der breiten Palette von Roboter-Zubehörprodukten von Schunk.“
Leichen sind nicht sehr gesprächig. Ist ein Mensch erst einmal verstorben, kann er nicht mehr schildern, wie er zu Tode gekommen ist. Das heraus zu finden, die Leiche sozusagen zum Sprechen zu bringen, ist die Aufgabe der Gerichtsmedizin. Dafür steht allerdings wenig Zeit zur Verfügung, denn der natürliche Zerfallsprozess macht keine Pausen. Das bei Autopsien bisher übliche Öffnen der Leiche zur Entnahme von Organen ist mühsame Handarbeit und stößt bei Hinterbliebenen oft auf Ablehnung. Zudem ist die Gefahr immanent, wertvolle Spuren zu verwischen und so die Ergebnisse zu verfälschen.
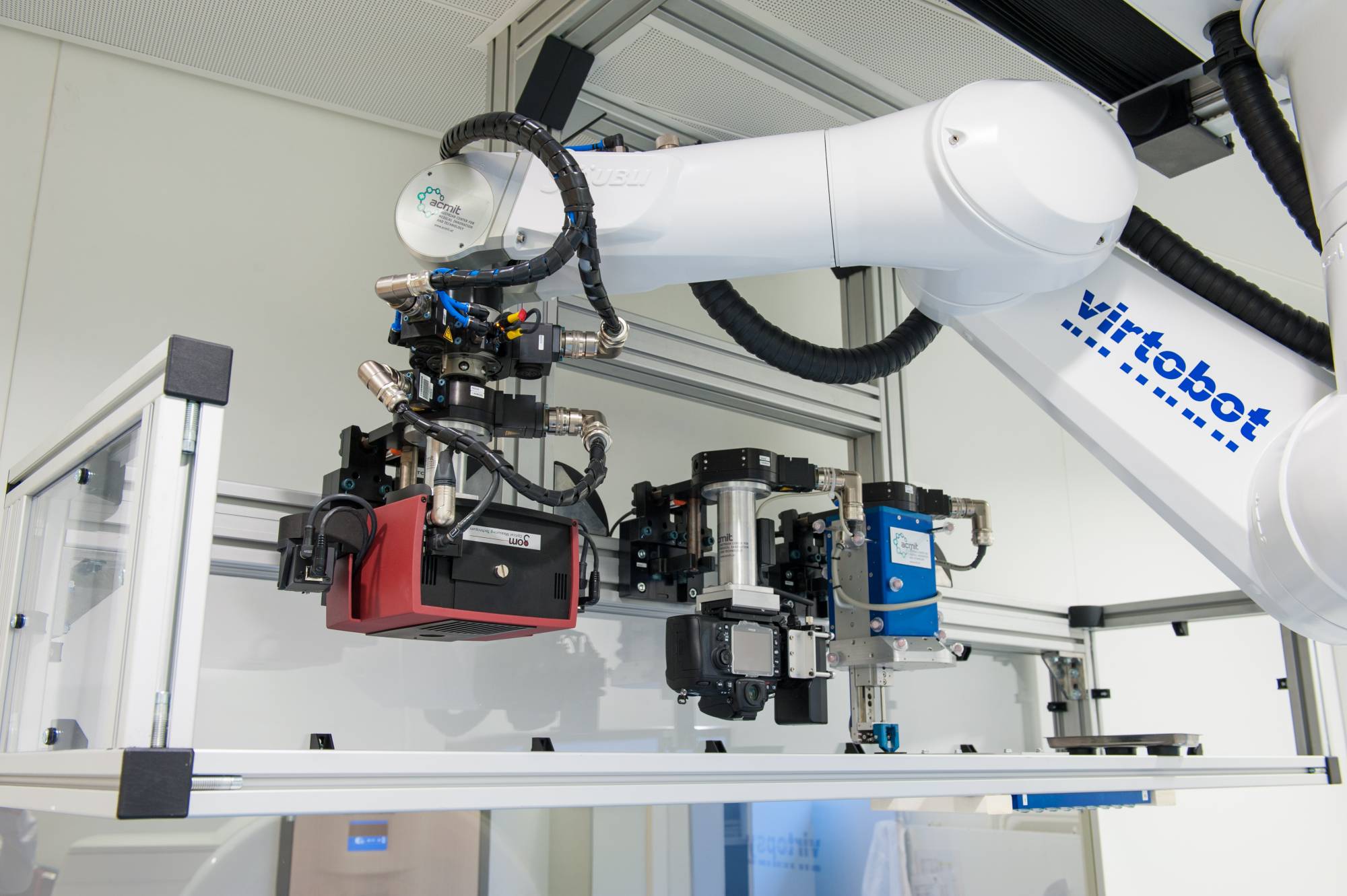
Der Wechsel der Endgeräte 3D-Oberflächenscanner, Digitalkamera und Biopsie-Einheit erfolgt automatisch.

DI (FH) Wolfgang Ptacek
Entwickler und Projektleiter ACMIT GmbH
„Ausschlaggebend für die Wahl des Schunk-Schnellwechselsystems war dessen Modularität mit einer Vielzahl von Optionen und die Verfügbarkeit hochwertiger Goldkontakte.“
Beweissicherung automatisiert
„Um schädliche Auswirkungen des Eingriffs gering zu halten, ist es naheliegend, die Entnahme von Gewebsproben minimal-invasiv durchzuführen“, sagt DI (FH) Wolfgang Ptacek, Entwickler bei der auf Technologien für die im Volksmund als ‚Schlüsselloch-Chirurgie‘ bezeichneten Operationsmethoden spezialisierten ACMIT GmbH in Wiener Neustadt. „Zugleich war ein Ziel unserer Entwicklungsanstrengungen, als Grundlage für forensische Analysen ein möglichst vollständiges Bild des gesamten Körpers aufzuzeichnen.“ Ohne chirurgische Eingriffe und ohne Interpretation durch die Erfassenden sollte das Verfahren äußere und innere Verletzungen sichtbar machen und die Grundlage für gerichtsmedizinische Diagnosen und Gutachten bilden.
Bereits 2006 war der Automatisierungstechniker in das Projekt Virtopsy (virtuelle Autopsie) eingebunden, bei dem ein Industrieroboter die Forensiker bei der Biopsie unterstützen sollte. Eine Pilotinstallation brachte nicht nur wertvolle Erkenntnisse, sondern auch eine Ausweitung des Anforderungsprofils. Den vielfältigen Anwendungsmöglichkeiten des Roboters entsprechend wurde daraus eine Gesamtanlage zur Befundaufnahme durch Kombination unterschiedlicher bildgebender Verfahren, realisiert von 2010 bis 2014 am Institut für Rechtsmedizin der Universität Zürich. „Hier werden bildgebende Diagnoseverfahren aus Medizin und Industrie zu einem gesamthaften digitalen Modell der Leiche kombiniert“, sagt Institutsleiter Prof. Dr. Michael J. Thali. „Zusätzlich kann der ‚Virtobot 2‘ genannte Roboter auf Basis dieser Informationen automatisch Hohlnadeln für die Entnahme von Gewebeproben punktgenau platzieren.“
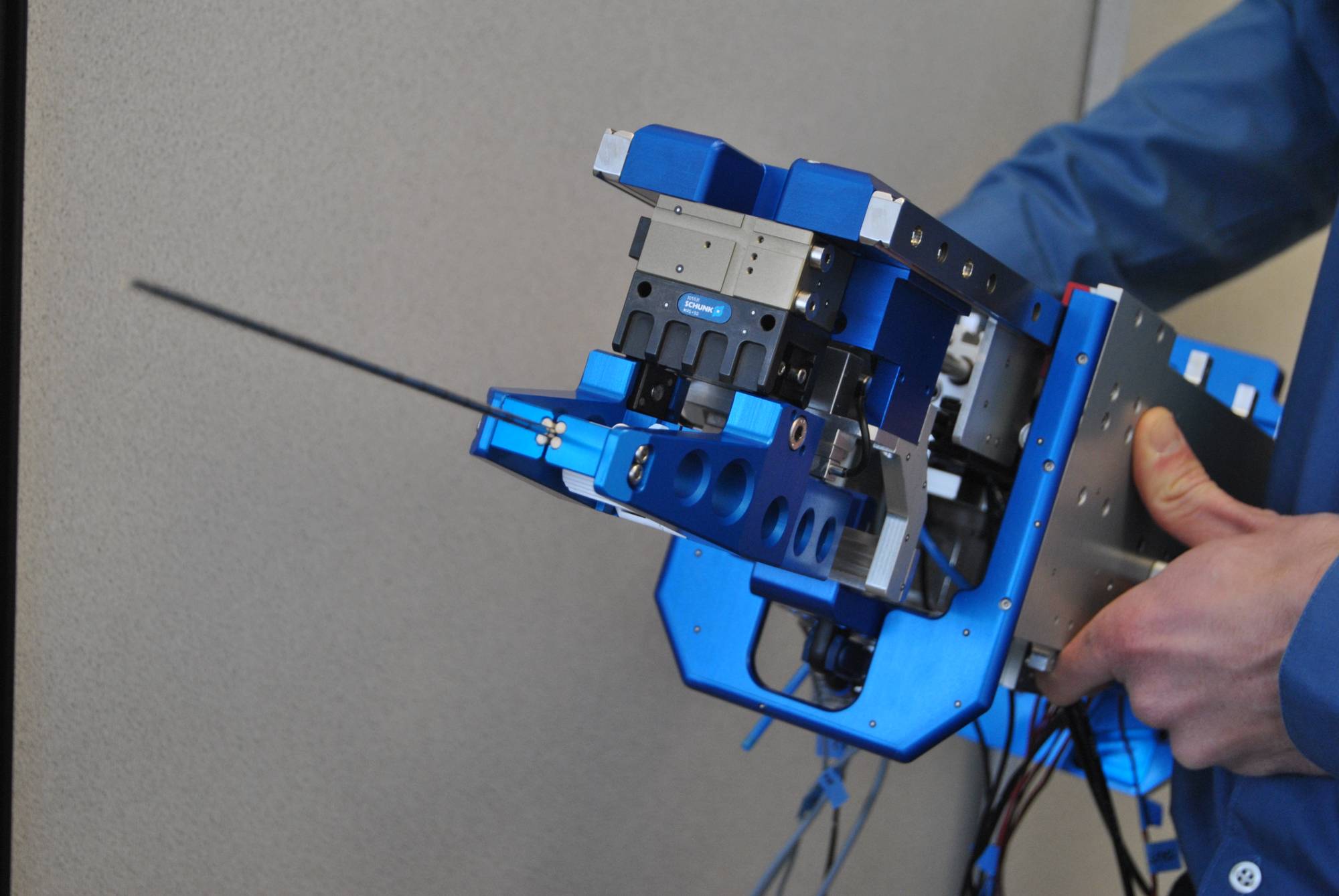
Im Prototypenstadium befindet sich eine Biopsieeinheit, mit der nicht nur das Setzen der Hohlnadeln roboterunterstützt erfolgen soll, sondern auch die automatische Entnahme der Gewebeproben. Bild: x-technik
Autopsie 4.0
Spätestens hier müsste die Frage verstummen, was das mit industrieller Automatisierung zu tun hat. Eines der Hauptthemen in der seit einigen Jahren geführten Diskussion über die vierte industrielle Revolution ist die Fähigkeit von Maschinen und Anlagen, sich auf Basis immer reichhaltigerer Daten aus Sensorik und Bildverarbeitung selbsttätig an veränderliche Gegebenheiten und Anforderungen anzupassen. Genau das geschieht hier, und zwar in einem Maß, das weit über das hinausgeht, was derzeit in der produzierenden Industrie anzutreffen ist.
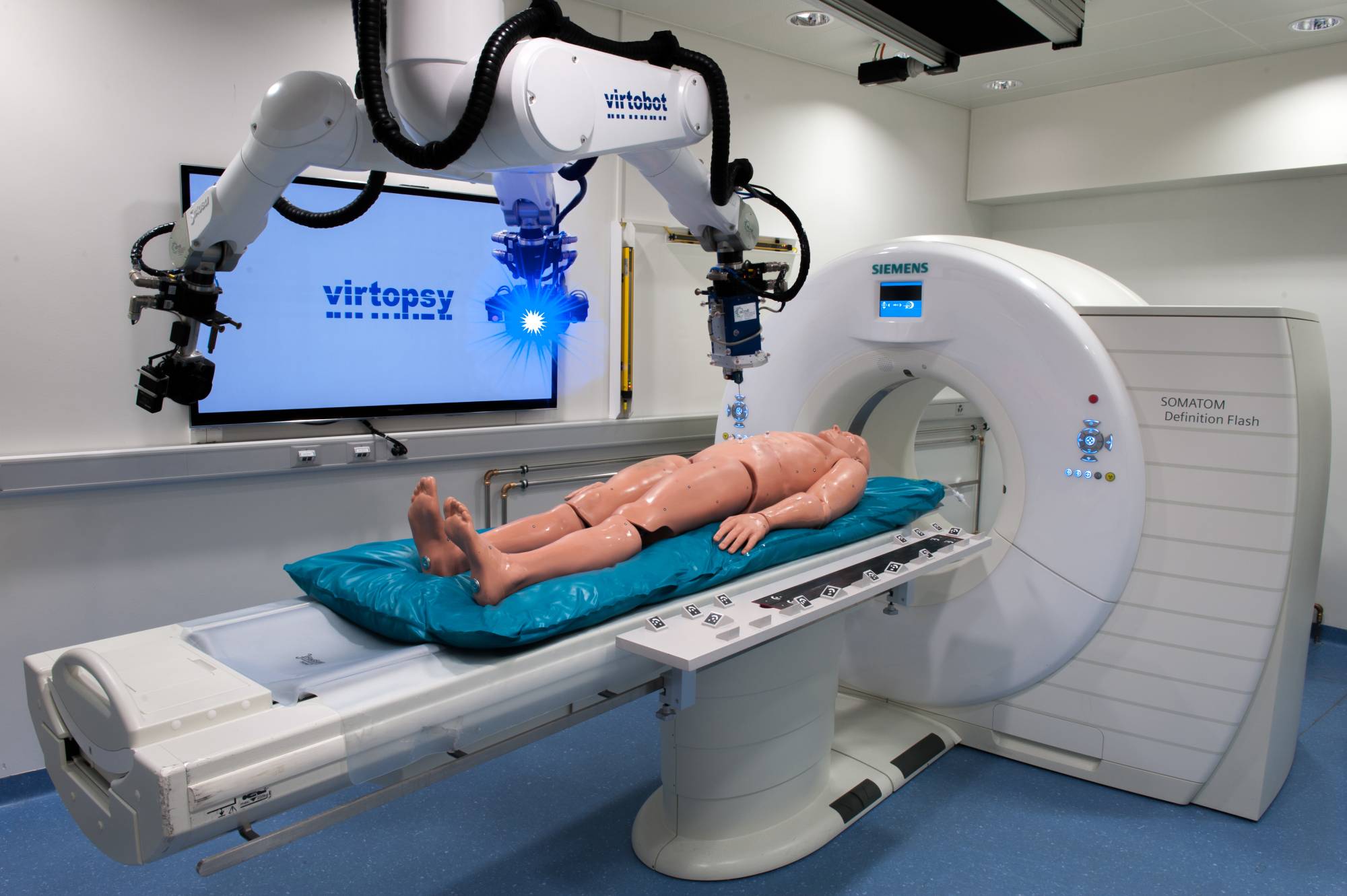
Der zu untersuchende Körper wird im Untersuchungsraum auf eine Pritsche gelegt. Diese ist Teil eines Computer- bzw. Magnetresonanz-Tomographen, aus dessen Schnittbildern sich 3D-Darstellungen des Körperinneren generieren lassen, um Verletzungen am Knochenbau und an manchen Weichteilen sowie lufthaltige Strukturen aufzudecken und die Position von Organen und Gefäßen für die minimalinvasive Gewebe-Entnahme zu bestimmen.
Mittels eines industriellen 3D-Oberflächenscanners wird ein Abbild des Leichnams als dreidimensionaler Volumskörper aufgenommen. Dieser wird mit dem Ergebnis des CT-Scans fusioniert und seine Oberfläche mit der Farbinformation von Bildern aus einer photogrammetrischen Serienaufnahme zu einem ein fotorealistischen 3D-Abbild angereichert. Insgesamt entsteht so eine vollständige innere und äußere Darstellung des Verstorbenen.

Zur Ankopplung der Endgeräte wird das pneumatische Schnellwechsel-System SWS von Schunk verwendet. Es ist mit zwei Elektro-Anschlussmodulen mit vergoldeten Kontakten ausgestattet.

Prof. Dr. Michael J. Thali
Leiter Institut für Rechtsmedizin an der Universität Zürich
„Der Einsatz von Virtobot 2 mit automatischem Wechsel der Endgeräte senkt die Untersuchungszeit und damit die Belegung des teuren Computertomographen von einer halben Stunde auf ca. 10 Minuten.“
Der Roboter als Aufklärer und Zieleinrichtung
Auf einer Linearachse an der Decke bewegt sich ein 6-Achs-Roboter. Er erledigt die Aufnahme einer photogrammetrischen Serie von bis zu 25 Einzelaufnahmen des Leichnams aus unterschiedlichen Positionen mit einer handelsüblichen Digitalkamera. Daraus resultiert eine wesentliche Zeitersparnis gegenüber händisch durchgeführten Aufnahmen mit der Notwendigkeit, ein Stativ zu verwenden und dieses für jede Aufnahme exakt neu zu positionieren.
Anschließend erfolgt die Herstellung des Oberflächenscans. Dabei bewegt der Roboter einen 3D-Scanner, wie er – etwa für Geometrieüberprüfungen – auch in der Industrie verwendet wird, über den zu untersuchenden Körper. Die von Fotokamera, 3D-Scanner und CT erfassten Bilddaten werden per Software für die virtuelle Analyse zu einem 3D-Gesamtmodell verschmolzenen. Die CT-Daten dienen dem Roboter dazu, mittels einer von ACMIT eigens konstruierten Biopsie-Vorrichtung Hohlnadeln an den passenden Stellen im Körper zu positionieren. Durch diese entnimmt der untersuchende Arzt mit feinster Nadel Körperflüssigkeiten oder Gewebeproben für die anschließende mikroskopische Untersuchung.

Automatisierung in der Gerichtsmedizin: Am Institut für Rechtsmedizin der Universität Zürich erfolgt roboterunterstützt durch Kombination verschiedener bildgebender Diagnoseverfahren und einer minimal-invasiven Biopsie die virtuelle Autopsie (www.virtopsy.com). Bilder: IRM, Universität Zürich
Infos zum Anwender
Die ACMIT GmbH (Austrian Center for Medical Innovation and Technology) mit Sitz in Wiener Neustadt ist auf die Erforschung und Entwicklung von Technologien für die im Volksmund als ‚Schlüsselloch-Chirurgie‘ bezeichneten minimal-invasiven Operationsmethoden spezialisiert.
ACMIT Gmbh
Viktor-Kaplan-Straße 2
A-2700 Wiener Neustadt
+43 2622 22859-0
www.acmit.at
Automatischer Werkzeugwechsel
Erfolgte der Wechsel der Endgeräte beim ersten Prototypen noch manuell, ist der Virtobot 2 mit einem pneumatischen Schnellwechsel-System SWS von Schunk ausgestattet. „Während das händische Umrüsten eines pneumatischen Effektors zwischen zehn und dreißig Minuten benötigt, reduziert ein Schnellwechsel-System den gleichen Vorgang auf zehn bis dreißig Sekunden“, nennt Schunk-Vertriebsingenieur Samuel Furthmayr einen der Hauptvorteile der Kupplung mit dem patentierten selbsthaltenden Verriegelungssystem. „Zudem entlastet sie das medizinisch-technische Personal von der anstrengenden Manipulation der schweren Endgeräte, die durch die Anordnung des Werkzeugmagazins in 2 m Höhe den Platz im CT-Raum nicht noch weiter einengen.“
„Den Ausschlag für die Auswahl dieses Schnellwechselsystems gab neben der bekannten Qualität und Zuverlässigkeit von Schunk-Produkten die große Flexibilität beim Anschluss mehrerer Elektromodule sowie deren Größe mit maximal 26 Kontakten“, berichtet Wolfgang Ptacek. „Diese sind zudem nur bei Schunk in vergoldeter Ausführung erhältlich.“
Multi-funktional: Nicht wie in der Fotomontage gleichzeitig, sondern nacheinander erfolgt am Roboterarm die Aufnahme einer Bilderserie mittels Fotokamera, ein 3D-Oberflächenscan und die zielgerichtete Platzierung der Biopsienadeln auf Basis der Informationen aus dem CT. Der auf einer Linearachse an der Decke montierte Virtobot-Roboter sorgt für eine kurze Belegung des Untersuchungsraumes.
Nadeln setzen mit sicherer Hand
Nicht nur am Anschluss zur Roboter-Kinematik, sondern auch an seinem vorderen Ende ist das Biopsie-Werkzeug mit Roboterzubehör von Schunk ausgestattet. Nacheinander werden bis zu zehn der 100 mm langen Koaxialnadeln einem pneumatischen Kleinteilegreifer MPG-plus von Schunk aus dem Vorratsmagazin entnommen und auf Basis des CT-Datensatzes an die richtigen Stellen und im korrekten Winkel in den Körper eingeführt.
„Greifer-Module von Schunk setzen in der Automation seit über 30 Jahren Maßstäbe, das umfassende Programm deckt mit optimal abgestuften Baugrößen das komplette Spektrum an Werkstückgrößen ab.“, sagt Samuel Furthmayr. „So war natürlich auch für diese Anwendung, in der ein großer Hubbereich im Verhältnis zur Baugröße wichtig ist, das Passende dabei.“
Die Medizin ist auf dem Weg, eine exakte Wissenschaft zu werden, und auf diesem Weg wird sie wohl noch lange bleiben. Was die forensische Medizin betrifft, ist Virtopsy mit dem Virtobot 2 ein Riesenschritt auf diesem Weg. In der Gerichtsmedizin hat sie bereits einen unumkehrbaren Veränderungsprozess ausgelöst.
Teilen: · · Zur Merkliste