Kuka sBot_Speed CIP: Industrietaugliches Zusammenspiel
Die Zusammenarbeit zwischen Mensch und Roboter in gemeinsamen Arbeitsbereichen ist gefragter denn je. Der Trend zu Roboterzellen ohne Schutzzäune und möglichst kleiner Baugröße hält in der Industrie weiter an. Dabei soll der Roboter möglichst einfach und ohne Kompromisse in manuelle Arbeitsschritte integriert werden.

3-Zonen-Sicherheitskonzept: Die Roboterzelle wird permanent überwacht und der Arbeitsbereich in drei Zonen eingeteilt.
Um diesem zunehmenden Bedarf an Mensch-Roboter-Kollaboration nachzukommen, sind kreative Ideen und praktikable Lösungen notwendig. Dabei sollen die Vorteile einer klassischen Industrieroboterzelle wie Geschwindigkeit, Genauigkeit, hohe Produktivität und Langlebigkeit keinesfalls zu kurz kommen. Zusätzlich spielt auch die Traglast des Roboters eine wesentliche Rolle, diese ist bei den vorhandenen Mensch-Roboter-Kooperationen bisher sehr begrenzt.
Kollaborative Roboter können diese hohen Ansprüche der Industrie nicht bedienen, da sie mit deutlich geringeren Geschwindigkeiten und geringeren Traglasten als Industrieroboter arbeiten. Auch im Bereich der Konnektivität und Integrationsmöglichkeiten in bestehende Anlagen werden die Grenzen rasch ersichtlich. Aus diesem Grund bietet Kuka zusammen mit Sick und Blue Danube Robotics nun eine Gesamtlösung an, die sowohl höchste Produktivität und neueste Sicherheitsstandards für kollaborative Anwendungen miteinander kombiniert. Dabei wird vor allem eine sichere Zusammenarbeit zwischen Roboter und Mensch garantiert und das bei Traglasten von mehreren 100 kg. Ein reibungsloses Zusammenspiel aller Komponenten wird dabei durch die Robotersteuerung und dem Kuka-Technologiepaket Safe-Operation möglich.
Als Beispielapplikation dient eine Anwendung, in der Bauteile manuell zusammengebaut werden und anschließend eine visuelle Inspektion vom Roboter durchgeführt wird. Dabei kann die Roboterzelle ohne Sicherheitszaun konzipiert werden und ein Annähern an den Roboter bzw. eine unmittelbare Zusammenarbeit ist zu jeder Zeit möglich. Die Gefahren dieses engen Teamworks sichert der Sicherheits-Laserscanner microScan3 von Sick zuverlässig ab – und ermöglicht somit eine gleichermaßen sichere wie effiziente Zusammenarbeit zwischen Mensch und Roboter.
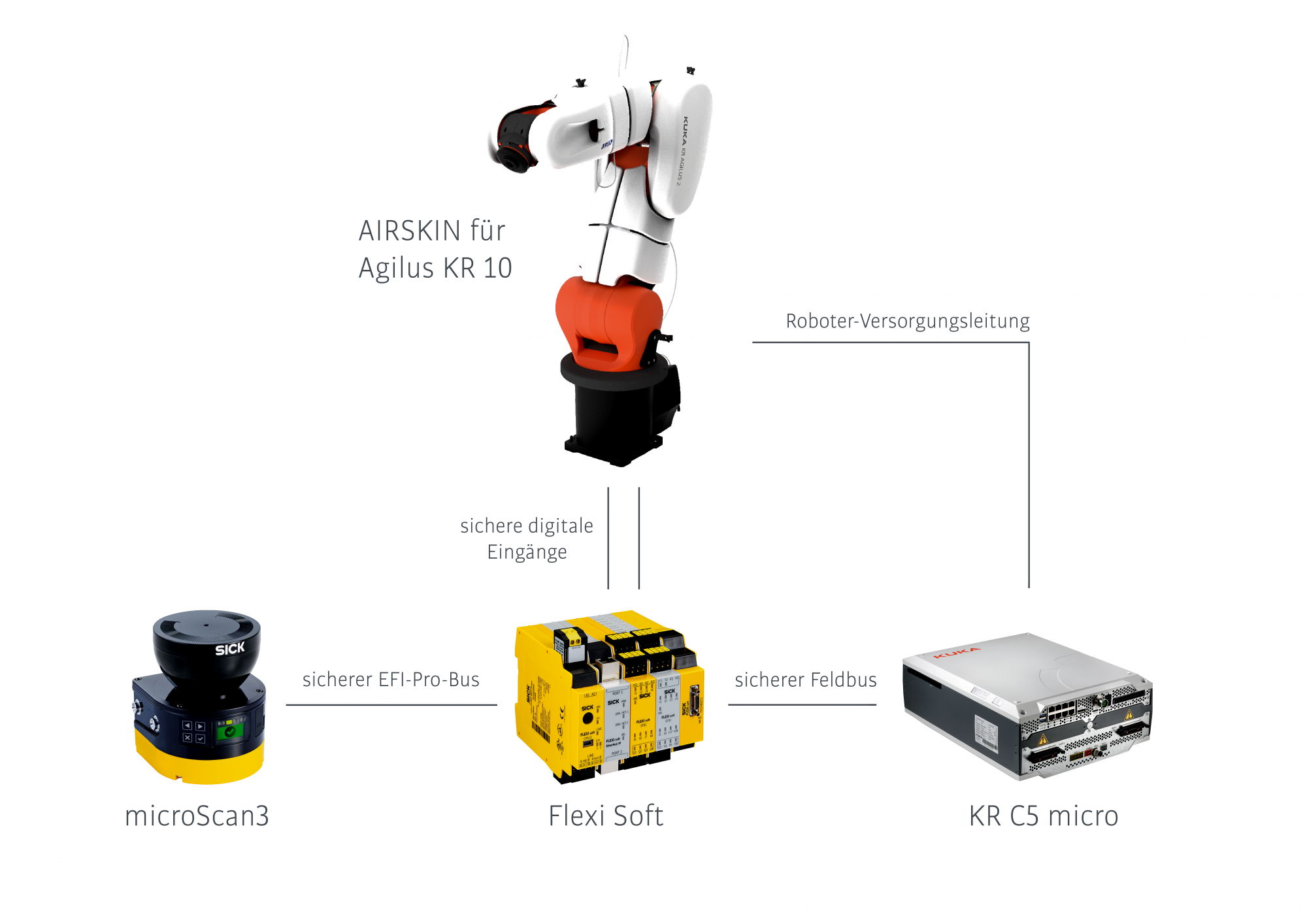
Systemaufbau: Für einen reibungslosen Betrieb muss die Kommunikation zwischen den Komponenten harmonieren.
Sicherheitssystem sBot Speed CIP
Die Systemvariante sBot_Speed CIP für Kuka der Firma Sick kombiniert einen microScan3 mit der Sicherheitssteuerung Flexi Soft und dem EFI-pro-Gateway. Das bereits verifizierte Sicherheitssystem ermöglicht eine sichere simultane Überwachung mehrerer Schutzfelder und detektiert zusätzlich Personen, die unter Umständen hinter den abgesicherten Bereich treten. Die roboterspezifischen Einstellungen und Kommunikationsparameter sind bereits vorkonfiguriert und lassen sich Dank EtherNet/IP™ CIP Safety™ schnell und sicher in die Robotersteuerung KUKA KRC4 integrieren. Das spart wertvolle Zeit in der Projektierung und Evaluierung des Sicherheitskonzeptes.

Kommt es zu einem Kontakt zwischen Mensch und Roboter löst die Sensorik der AIRSKIN einen Sicherheitshalt 1 aus.
3-Zonen-Sicherheitskonzept
Mit dem microScan3 wird die Roboterzelle permanent überwacht und der Arbeitsbereich in drei Zonen eingeteilt. Befindet sich keine Person im Gefahrenbereich (grüner Bereich) kann der Roboter lineare Geschwindigkeiten bis zu 2 m/s erreichen. Ein vergleichbarer kollaborativer Roboter arbeitet maximal mit einer Geschwindigkeit von 1 m/s. Nähert sich eine Person dem Roboter und befindet sich diese somit im orangen Bereich, wird die Geschwindigkeit des Roboters so reduziert, dass diese den Anforderungen laut Risikobeurteilung nach ISO TS15066 entspricht. Der orange Bereich dient als Detektionsbereich und wird als Pufferzone eingesetzt, damit der Roboter auf die folglich erforderliche Geschwindigkeit reduzieren kann. Das Betreten des gelben Bereichs aktiviert nun die sichere Überwachung dieser reduzierten Geschwindigkeit. Sollte diese überschritten werden, stoppt der Roboter mit einem Sicherheitshalt 1 (bahnnaher NOT-HALT) laut EN 60204. Werden nun der orange und gelbe Bereich des Laserscanners wieder verlassen und befindet sich somit keine Person im Gefahrenbereich, beschleunigt der Roboter eigenständig auf die programmierte Geschwindigkeit.

Damit auch die Bedienung zwischen Industrieroboter und Mensch möglichst praktikabel und effizient erfolgt, kommt das Optionspaket KUKA.Handguiding zum Einsatz.
Intelligente Haut schützt vor Verletzung
Befindet sich nun ein Mitarbeiter in unmittelbarer Nähe des Roboters, bewegt sich dieser mit reduzierter überwachter Geschwindigkeit. Kommt es zu einem Kontakt zwischen Mensch und Roboter, löst die Sensorik der AIRSKIN ebenfalls einen Sicherheitshalt 1 aus. Die AIRSKIN besteht aus speziell an den Roboter angepassten Luftkissen, in denen der Druck permanent überwacht wird. Kommt es nun zu einem Kontakt ändert sich durch Eindrücken des Luftpolsters der innere Druck und die AIRSKIN wird betätigt. Nach dem Auslösen muss sich ein Mitarbeiter vergewissern, ob ein Weiterarbeiten des Roboters möglich ist. Nach erfolgter Quittierung nimmt der Roboter die Arbeit an jener Stelle im Programm wieder auf, an der er unterbrochen wurde. Zusätzlich zeigen integrierte LEDs dem Bediener den Status der AIRSKIN an.

Die Gefahren engen Teamworks sichert der Sicherheits-Laserscanner microScan3 von Sick zuverlässig ab und ermöglicht somit eine gleichermaßen sichere wie effiziente Zusammenarbeit zwischen Mensch und Roboter.
KUKA.SafeOperation
Das Technologiepaket SafeOperation ist dabei die Schnittstelle zwischen den Sicherheitskomponenten. Es verarbeitet die Signale der Sicherheitsschnittstelle, überwacht die Roboterbewegung und bietet noch weitere Sicherheitsfeatures. Diese sind u. a. das Definieren von sicheren Überwachungsräumen, das sichere Überwachen der Geschwindigkeiten und die regelmäßige Justagereferenzierung. Mit diesen zusätzlichen Funktionen kann die Position des Tools während des gesamten Betriebs überwacht und der Roboter bei Fehlverhalten sicher gestoppt werden. Um bei Störungen oder Verletzungen von Raumgrenzen die Roboterbewegungen schnell genug stoppen zu können, muss ein einwandfreier Zustand der Bremsen gewährleistet werden. Dies erfolgt durch einen automatischen Bremsentest. Dabei wird zyklisch überprüft, ob die Bremsmomente der Motoren ausreichend hoch sind und bei Bedarf für einen sicheren Stopp des Roboters sorgen.

KUKA.Handguiding mit ready2_pilot
Damit auch die Bedienung zwischen Industrieroboter und Mensch möglichst praktikabel und effizient erfolgt, kommt das Optionspaket KUKA.Handguiding zum Einsatz. Das Steuerungspaket ermöglicht eine drahtlose Handführung von Industrierobotern auf besonders benutzerfreundliche Art. Die Steuerung erfolgt über eine am Roboter montierte 6D-Maus, die das Programmieren von Bewegungspunkten und das Aufzeichnen von Bewegungssequenzen möglich macht. Dadurch kann der Kuka Industrieroboter auf einfache und intuitive Art und Weise bewegt werden. Die Verwendung dieses Pakets erfordert weder eine Schulung noch eine zeitaufwändige Einschulung der Mitarbeiter.

Systemaufbau
Um einen reibungslosen Betrieb gewährleisten zu können, muss auch die Kommunikation zwischen den Komponenten harmonieren. Dabei erfolgt die Anbindung des Sick-Sicherheitssystems (Sicherheits-Laserscanner microScan3 + Sicherheitssteuerung Flexi Soft) an die Robotersteuerung über einen sicheren Feldbus wie Ether-Cat/FSoE, EtherNet/IP/CIP Safety oder PROFINET/PROFIsafe. Die AIRSKIN wird über zwei Kanäle an die Sicherheitseingänge der Sicherheitssteuerung angeschlossen.
Mit diesem Gesamtpaket aus Industrieroboter, AIRSKIN und Sick-Sicherheitssystem können die Ansprüche kollaborativer Robotik bei höchster Produktivität realisiert werden. Die Vorteile liegen klar auf der Hand: Geringerer Platzbedarf durch Wegfall von Schutzzäunen. Sichere Zusammenarbeit zwischen Mensch und Roboter in jeder Situation. Hohe Produktivität und Qualität durch den Einsatz von Industrierobotern und -komponenten. Skalierbares Konzept für den gesamten Traglastbereich von 3 bis 250 kg.
Dabei kann Kuka vor allem durch jahrelange Erfahrung in der Industrie Zuverlässigkeit in der Produktion garantieren. Zusätzlich deckt die Kooperation zwischen Kuka und Blue Danube Robotics ein breites Produktportfolio von unterschiedlichsten Industrierobotern inkl. AIRSKIN ab. Das Angebot reicht von Kleinstrobotik mit Traglasten von 3 kg bis hin zu Robotern mit Traglasten von 250 kg. Mit dieser Auswahl können die unterschiedlichsten Anwendungen im Bereich roboterbasierter Automatisierung realisiert werden.
Teilen: · · Zur Merkliste