Faulhaber-Antriebe für Tempo in der Intralogistik
Passende Transportstrukturen in der Intralogistik sind in allen Branchen Voraussetzung, um dem Wettbewerbsdruck auch zukünftig standzuhalten. Automatische Regalbediengeräte, selbstfahrende Transportsysteme und intelligente Logistikroboter übernehmen immer mehr Arbeitsschritte, sowohl beim Einlagern als auch bei der Entnahme und Versandvorbereitung. Um die Prozesse zu beschleunigen, sind hier flexible Systeme gefragt, die rund um die Uhr effizient und zuverlässig arbeiten. Bewegt werden solche Logistiklösungen oft durch leistungsstarke Kleinstmotoren.

Die Anforderungen, die moderne Intralogistik an die eingesetzten Antriebe stellt, sind hoch: Sie müssen oft unter sehr beengten Verhältnissen beträchtliche Kräfte freisetzen, auch im Dauer- oder Stop-and-go-Betrieb zuverlässig arbeiten und dabei häufig auch noch hochpräzise positionieren. (Bilder, sofern nicht anders angegeben: Faulhaber)
Die Anforderungen, die moderne Intralogistik an die eingesetzten Antriebe stellt, sind hoch: Sie müssen oft unter sehr beengten Verhältnissen beträchtliche Kräfte freisetzen, auch im Dauer- oder Stop-and-go-Betrieb zuverlässig arbeiten und dabei häufig auch noch hochpräzise positionieren. Auch die Geschwindigkeit spielt eine wichtige Rolle, schließlich müssen in großen Lagern täglich viele tausend Aufträge verarbeitet werden. Antriebssysteme von Faulhaber haben hier ihre Leistungsfähigkeit schon oft bewiesen, beim Sortieren und Transportieren ebenso wie beim Ein- und Auslagern. Dank ihres modularen Designs können die Motoren mit einer Vielzahl an hochauflösenden Encodern für präzise Positionieraufgaben und leistungsstarken Getrieben für hohe Drehmomentanforderungen kombiniert werden. Zusätzlich gibt es kompakte Motion-Controller, die entweder in den Antrieben integriert sind oder sich extern anordnen lassen.

Autonom fahrende und selbständig handelnde Logistikroboter bilden einen entscheidenden Baustein für eine „Intralogistik 4.0“. Sie sind beim Einlagern ebenso wie bei der Entnahme und Versandvorbereitung im Einsatz.(Bild: Toru/Zalando)
Kraftvolles Handling mit Fingerspitzengefühl
Autonom fahrende und selbständig handelnde Logistikroboter bilden einen entscheidenden Baustein für eine „Intralogistik 4.0“. Sie sind beim Einlagern ebenso wie bei der Entnahme und Versandvorbereitung im Einsatz. Sie optimieren den Materialfluss, entlasten Mitarbeiter und ersetzen beispielsweise herkömmliche Stapler oder Lager-Ameisen. Ein Beispiel sind autonom fahrende Kommissionier-Roboter, die den stückgenauen Zugriff auf einzelne Objekte ermöglichen. Ein typischer Aufbau eines solchen Kommissionier-Roboters besteht aus Hubsäule und Greifer. Er enthält als Antriebseinheit zum Beispiel bürstenlose DC-Servomotoren der Serie BX4 mit integriertem Motion-Controller und Planetengetriebe. Beim Einsatz im Greifer sorgt diese Kombination für präzises Positionieren beim Ein- oder Auslagern und das im Dauerbetrieb mit ständigem Lastwechsel.
Dabei wiegt die komplette Antriebseinheit nur etwa 300 g. Dadurch kann selbst bei voll ausgefahrenem Greifer auf ein Gegengewicht verzichtet werden. Mit einem Durchmesser von gerade einmal 32 mm und einer Länge von 85,4 mm sind die bürstenlosen DC-Servomotoren zudem sehr kompakt. Damit ist es möglich, den Greifer sehr flach zu konstruieren, sodass er auch Pakete aufnehmen kann, die knapp über dem Boden gelagert sind. Teure Lagerfläche lässt sich so optimal ausnutzen. Durch das bürstenlose Kommutierungssystem sind die Motoren langlebig und zuverlässig. Sie liefern hohe Drehmomente und arbeiten dank des gewuchteten Rotors sehr laufruhig. Durch die integrierte Stromregelung wird bei Bedarf das Drehmoment begrenzt und der Antrieb damit zuverlässig vor Überlast geschützt.

Kompaktantriebe für den schnellen Start-/Stopp-Betrieb
Ebenfalls bei Handling-Aufgaben bewährt haben sich graphitkommutierte DC-Kleinstmotoren der CXR-Serie in Verbindung mit darauf abgestimmten Getrieben. Ihr Kommutierungssystem ist sehr robust und eignet sich besonders für dynamische Hochleistungsapplikationen mit schnellem Start-/Stopp-Betrieb, wie es bei vielen Handling-Systemen, aber auch beim automatischen Sortieren gefordert ist, zum Beispiel wenn auf Transportstrecken Weichen gestellt werden.
Die Gleichstrommotoren lassen sich durch ihre lineare Charakteristik zudem einfach regeln. Kombiniert mit hochauflösenden Encodern sind sie damit für präzise Positionieraufgaben gut geeignet. Hochwertige Neodymmagnete und die bewährte Faulhaber-Wicklung sorgen für eine hohe Leistungsdichte bei kompakter Bauform. Sie lassen sich dadurch direkt in die Handling-Elemente einbauen. Dort können sie trotz ihrer geringen Baugröße beträchtliche Gewichte stemmen.
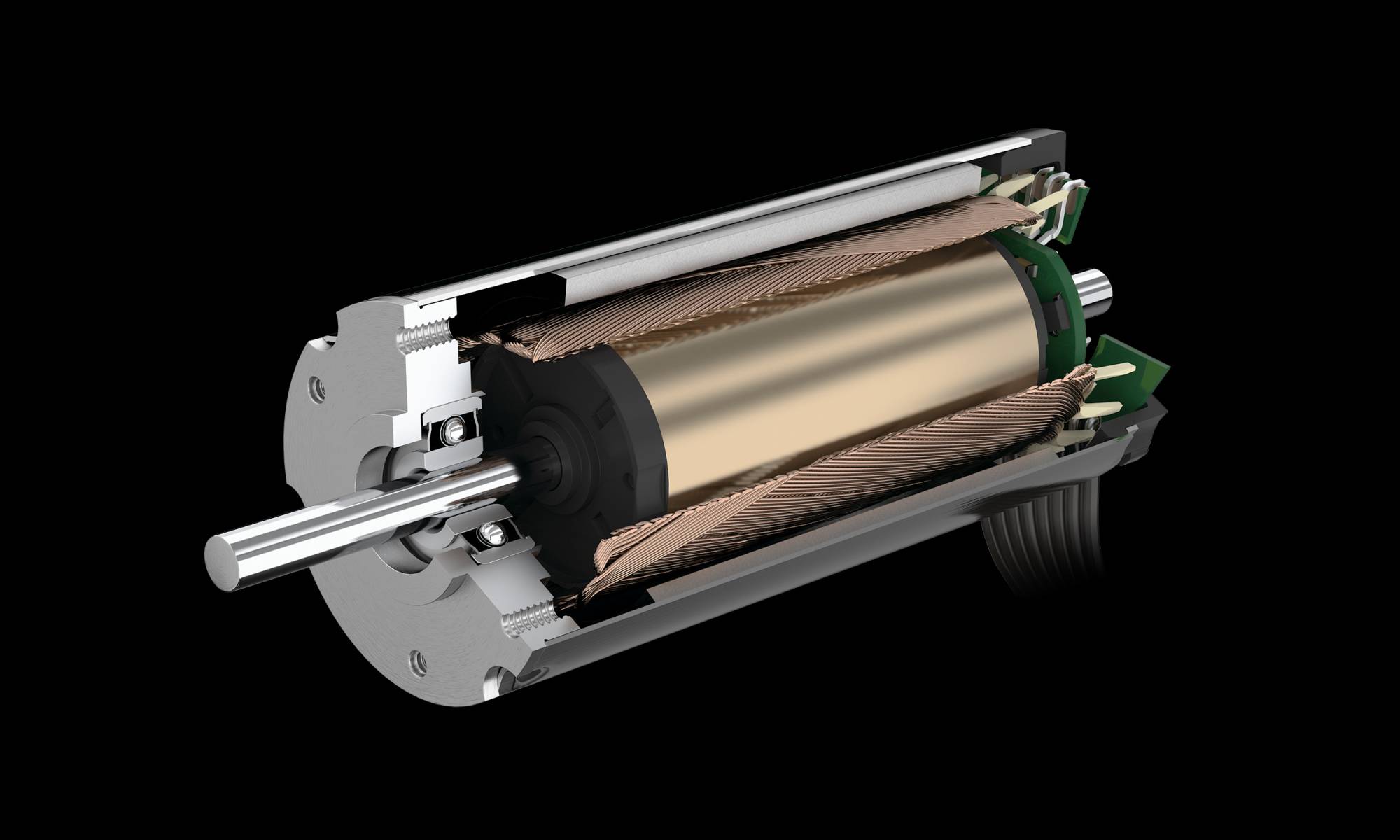
Bürstenloser DC-Servomotor der Serie BX4.
Flexibel durch die Produktion
Fahrerlose Transportsysteme (FTS, engl. Automated Guided Vehicle/AGV) sind das Mittel der Wahl, um einen flexiblen Transport im Produktionsprozess zu gewährleisten. In innerbetrieblichen Materialtransportsystemen zählen für die eingesetzten Antriebe Verfügbarkeit, Schnelligkeit, Flexibilität und oft auch geringer Platzbedarf zu den wichtigsten Anforderungen. Auch der Strombedarf spielt eine Rolle, damit die Akkukapazität der Fahrzeuge möglichst lange reicht. Als treibende Kraft für die Räder geeignet sind beispielsweise bürstenlose DC-Servomotoren der BP4-Serie, die Motorkraft lässt sich über Planetengetriebe und Antriebsriemen auf die Räder übertragen. Die Motoren arbeiten mit hohem Wirkungsgrad; ihre innovative Wicklungstechnologie ermöglicht einen hohen Kupferanteil und reduziert die Verluste dank hoher Wicklungssymmetrie auf ein Minimum.
Für die präzise Positionserfassung sind direkt an den Servomotoren Encoder der Serie IE3-1024 angebracht. Diese magnetischen Inkremental-Encoder, die es mit verschiedenen Auflösungen gibt, haben einen Indexkanal zur Referenzierung einer Umdrehung der Antriebswelle und eine standardisierte elektronische Encoderschnittstelle. Auflösung, Drehrichtung, Indexbreite und Indexposition lassen sich flexibel an die Anwendung anpassen. Die Ansteuerung der Servomotoren übernimmt ein Motion-Controller. Auch bei mobilen Roboterplattformen, die sich ohne vorinstalliertes Leitsystem völlig autonom in Industriehallen bewegen, sind solche Antriebssysteme mit von der Partie. Hier können sie in den Radmodulen vor allem durch ihre hohe Leistungsdichte punkten.
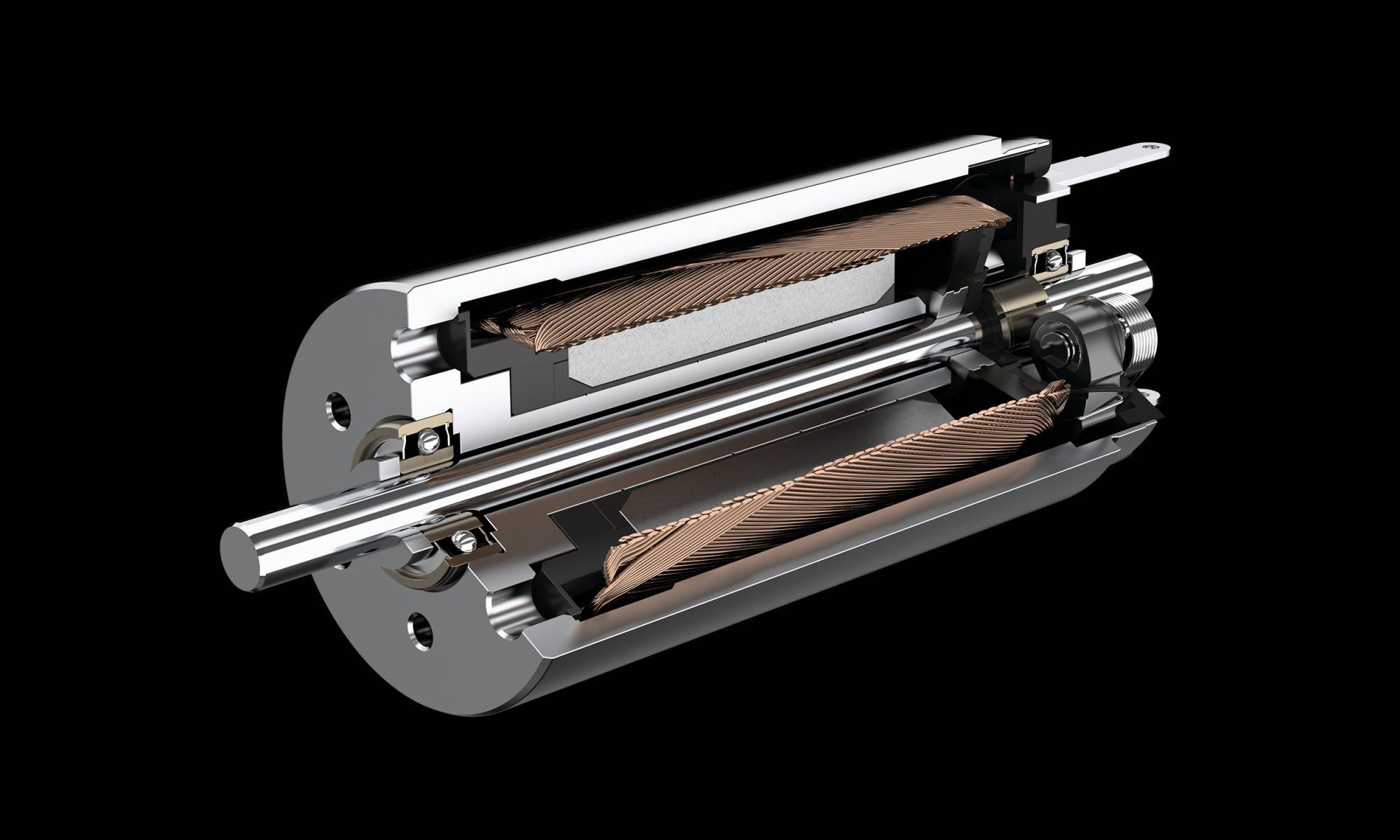
Bei Handling-Aufgaben bewährt haben sich graphitkommutierte DC-Kleinstmotoren der CXR-Serie.
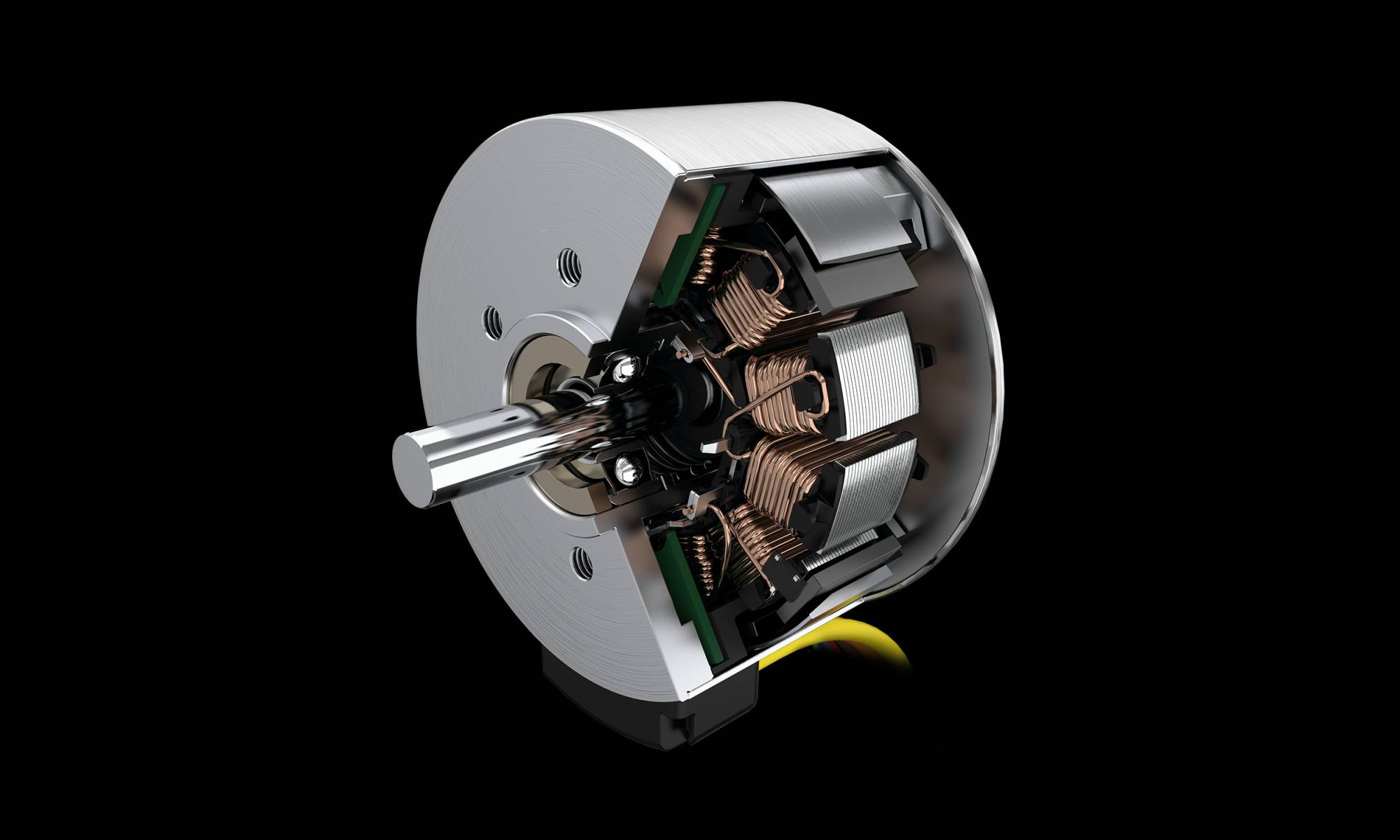
Ist bei Radantrieben der Einbauplatz in axialer Richtung knapp bemessen, bieten sich oft die drehmomentstarken Flachmotoren der BXT-Serie an.
Viel Leistung auf kleinstem Raum
Ist bei Radantrieben der Einbauplatz in axialer Richtung knapp bemessen, bieten sich oft die drehmomentstarken Flachmotoren der BXT-Serie an. Dank innovativer Wickeltechnik und optimierter Auslegung sind die Motoren selbst nur 14, 16 und 21 mm lang, liefern aber Drehmomente bis 134 mNm bei einem Durchmesser von 22, 32 bzw. 42 mm. Zur exakten Drehzahlregelung oder bei hohen Anforderungen an die Positioniergenauigkeit werden jetzt durchmesserkonforme magnetische Encoder oder Speed Controller vollständig in die gehäusten Motorvarianten integriert, wodurch sich der Antrieb lediglich um 6,2 mm verlängert. Für die Drehzahlregelung werden die in den Motoren integrierten, digitalen Hallsensoren genutzt. Damit steht ein breiter Drehzahlbereich von 200 U/min bis zu 10.000 min⁻¹ zur Verfügung. Die kompakte Antriebskombination ist ideal für platzkritische Anwendungen und bietet eine einfache Installation und Inbetriebnahme. Die passenden Metall-Planetengetriebe der Baureihe GPT zeichnen sich ebenfalls durch kurze Bauweise, hohes Drehmoment und feinste Abstufungen der zahlreichen Untersetzungsverhältnisse aus.
Teilen: · · Zur Merkliste