anwenderreportage
Faulhaber bietet Lernplattform für autonome mobile Roboter und Fahrerlose Transportsysteme
Typischerweise entlasten Roboter Menschen von monotonen Tätigkeiten. Das gilt auch für den Transport in der Produktion und Intralogistik. Hier können in zahlreichen Anwendungsfällen autonome mobile Roboter (AMR) oder Fahrerlose Transportsysteme (FTS) zu effizienzsteigernden Helfern werden. Allerdings fehlt in vielen Unternehmen noch das Know-how bzw. die Erfahrung im Umgang mit diesen Systemen. Eine entsprechende Roboterlernplattform erleichtert Anwendern nun den Einstieg in die Welt von AMR und FTS. Von den eingesetzten Antrieben wird in der Lernplattform ebenso wie in der realen Anwendung einiges verlangt.

Eduard ist eine Lehr- und Prototyping-Plattform, die für die Aus- und Weiterbildung von Mitarbeitern im Umgang mit mobiler Robotik genutzt werden kann.

Markus Fenn
Geschäftsführer bei EduArt Robotik GmbH
„Die qualitativ hochwertigen Faulhaber-Antriebe haben sich für unsere Roboterlernplattform als optimal erwiesen. Uns begeistert zudem, dass sich mit dem modular aufgebauten Antriebsangebot sehr viele Antriebskombinationen realisieren lassen.“
Auf Anfrage eines Industrieunternehmens hat die EduArt Robotik GmbH Neunkirchen am Sand eine Lehr- und Prototyping-Plattform entwickelt, die für die Aus- und Weiterbildung von Mitarbeitern im Umgang mit mobiler Robotik genutzt werden kann. Zusätzlich zur Roboterlernplattform bietet das Unternehmen ein Lehr- und Serviceangebot zum Testen und Optimieren.
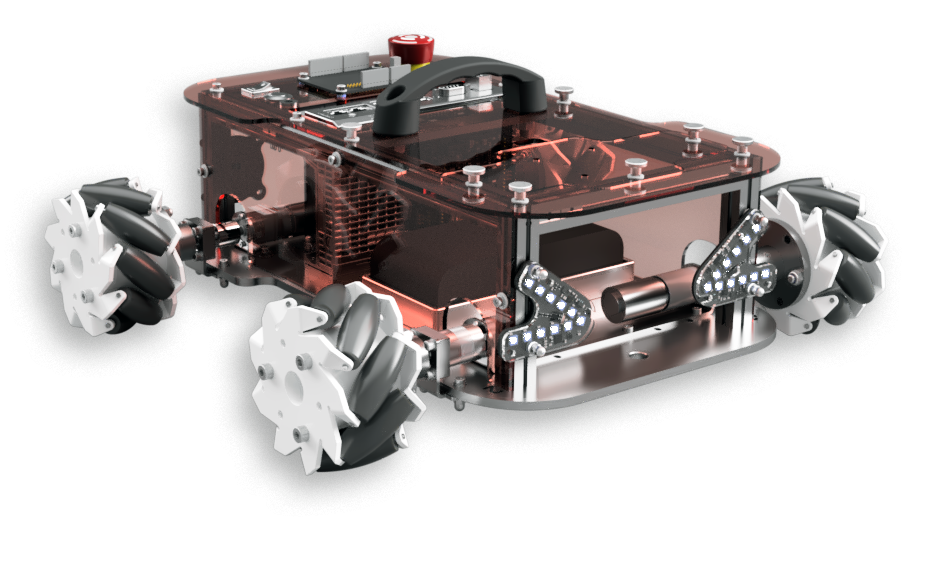
Eduard unterstützt im Umgang mit mobiler Robotik.
Infos zum Anwender
Das mittelfränkische Unternehmen EduArt Robotik GmbH wurde im Juni 2021 von Prof. Dr. Stefan May und M. Sc. Markus Fenn gegründet. Der Gründungsgedanke lag darin, einen Roboter für Bildungszwecke zu entwickeln, um die mobile Robotik in allen Bereichen der Lehre und in allen Altersstufen einsetzen zu können. Der Bedarf hierfür spiegelt sich in vielen Bereichen der Industrie und Gastronomie wider, in denen mit steigender Zahl autonome Roboter für Transportaufgaben eingesetzt werden.
Mittlerweile verkauft das Unternehmen neben diesen Robotern und Abwandlungen davon auch die eigens designten Platinen. Entwicklungsaufträge in den Bereichen Robotik, autonome Drohnen, Platinendesign, Mechanikdesign und Software im Allgemeinen gehören mittlerweile zum Tagesgeschäft des wachsenden Expertenteams.
Erweiterbare Roboterlernplattform
Die entstandene Roboterlernplattform heißt Eduard (Bild 1), ist ca. 40 x 40 x 15 cm groß und wiegt knapp 8 kg. In ihr ist ein Sensorkonzept samt Distanz- und Inertialmessgeräte integriert ebenso wie ein Batteriemanagementsystem. Der Zugriff ist über offene Schnittstellen möglich. Für Bewegung des mobilen Roboters sorgen entweder einfache Gummireifen oder aber Mecanum-Räder. Letztere ermöglichen es dem Roboter, auf der Stelle zu drehen sowie seitlich oder diagonal zu fahren. Auch in sehr engen Räumen kann damit navigiert und exakt positioniert werden. Bei beiden Räder-Varianten kommen Faulhaber-Motoren zum Einsatz. „Diese qualitativ hochwertigen Antriebe haben sich für unsere Anwendungsfälle als optimal erwiesen“, bestätigt Markus Fenn, Geschäftsführer der EduArt Robotik GmbH. Je nachdem, welche Geschwindigkeit bzw. welches Drehmoment gefordert ist, stehen am Antrieb Getriebe mit einer Übersetzung von 72:1 oder 89:1 zur Wahl. Die Basisausstattung der Roboterlernplattform kann der Anwender selbst erweitern oder von EduArt gemäß den eigenen Bedürfnissen anpassen lassen. Damit wird es möglich, neue Konzepte wie beispielsweise ein anderes Sensorsystem kosteneffizient zu testen.
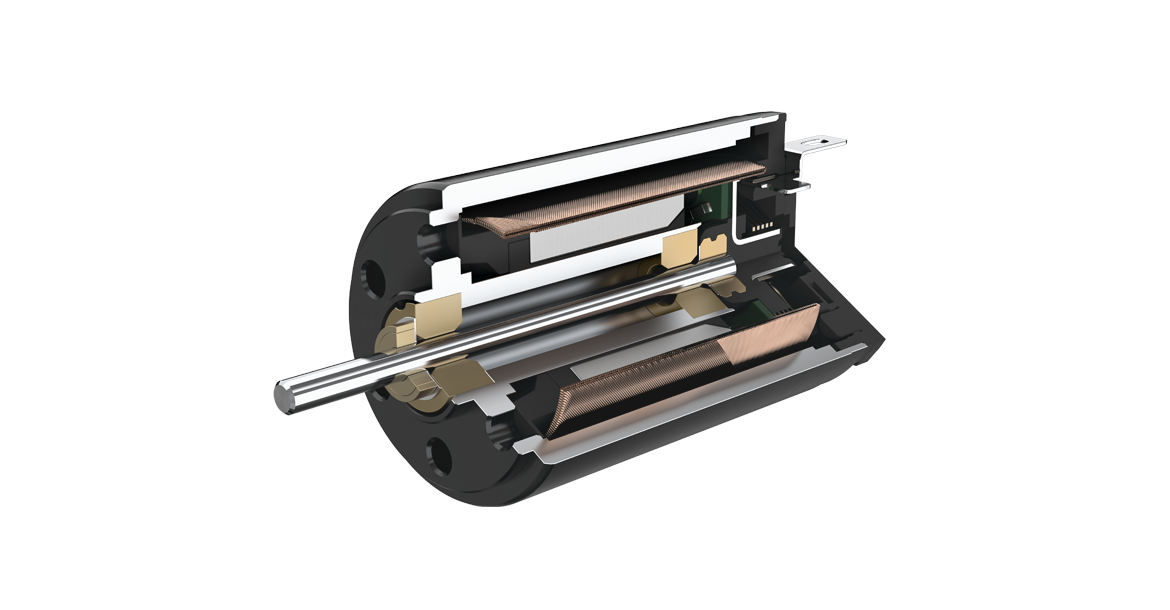
Eduard wird von DC-Kleinstmotoren mit Edelmetallkommutierung angetrieben. Sie liefern trotz ihrer geringen Abmessungen ein großes Drehmoment.
Flexible Antriebstechnik
Bei der Wahl der eingesetzten Antriebssysteme galt es zu berücksichtigen, dass diese auch zukünftigen Anforderungen von FTS- und AMR-Konzepten erfüllen müssen. Die Wahl fiel daher auf DC-Kleinstmotoren mit Edelmetallkommutierung von Faulhaber. Diese liefern trotz ihrer geringen Abmessungen ein großes Drehmoment und überzeugen durch ihre hohe Leistungsdichte. Zudem lassen sie sich präzise ansteuern und eignen sich für hochgenaue Regelkreise. Für größere Plattformen haben die Roboterbauer große DC-Motoren desselben Herstellers verwendet. Alternativ lassen sich diese Antriebe aber je nach Anwendung auch durch wartungsfreie und langlebige bürstenlose DC-Motoren ersetzen.
Mit dem Trend zu sinkenden Losgrößen und steigender Variantenvielfalt wird man künftig mehr Roboter für kleinere Lasten benötigen, d. h. kleinere Roboter mit kleineren, aber leistungsfähigeren Antrieben. Solche autonomen Flurförderzeuge haben einen reduzierten Elektronikaufwand und kleinere Akkus, was weniger Gewicht und einen geringeren Energieverbrauch mit sich bringt. Auch hierfür finden sich im breiten Sortiment der Antriebsexperten aus Schönaich die passenden Lösungen. Stehen irgendwann wieder höhere Lasten an, sind das Hochskalieren und das Arbeiten im Verbund ebenfalls kein Problem.

Die Variante mit Mecanum-Rädern ermöglicht es dem Roboter, auf der Stelle zu drehen sowie seitlich oder diagonal zu fahren.
Software einfach entwickeln und testen
Komplex an FTS- und AMR-Lösungen ist in der Regel nicht die Hard-, sondern vielmehr die Software. So ist beispielsweise gute Planung auf Softwareseite wichtig, damit alle mobilen Roboter problemlos zusammenarbeiten oder ein zuverlässiges Flottenmanagement möglich wird. Roboter müssen dazu selbst „denken“, sich über Standardschnittstellen austauschen und wenn nötig kooperieren. Die Software muss dabei nur wenig über den jeweiligen mobilen Roboter wissen, sondern lediglich berechnen, wo der Roboter auf dem Hallenplan lokalisiert ist. Die Navigation, die als eine der wenigen Komponenten die Maße des Roboters kennt, sucht dann den geeigneten Pfad. Um die geforderte Geschwindigkeit zu erreichen, errechnet der Motorcontroller, wie viele Radumdrehungen nötig sind. Auch um dies anzupassen, werden nur wenige Zeilen im Programmcode oder eine Konfigurationsdatei benötigt. Faulhaber liefert dazu Motoren mit hochgenauen Getrieben und Encodern für eine exakte Positionierung, die zusammen optimale Leistung und Sicherheit bringen. „Wichtig waren dazu auch die entsprechenden Kommunikations-Schnittstellen, damit sich die Antriebe mit dem restlichen System entsprechend 'austauschen' können“ sagt Fenn.
Sicherheit
Ebenfalls wichtig beim Einsatz von mobilen Robotern ist natürlich das Thema Sicherheit, und zwar im Sinne von Security und Safety. Letztere wird beispielsweise dadurch erreicht, dass der Motorcontroller erkennt, wenn einer der Motoren ausfällt und die Fahrt dann sofort stoppt. Tritt ein Mensch in den Fahrbereich, wird dieser vom Laserscanner wahrgenommen und das System bremst. Safety ist insofern ein spannendes Thema, als dass die einzelnen mobilen Roboter über Kommunikationsnetzwerke wie WLAN oder 5G miteinander kommunizieren. Auch hierfür wurden entsprechende Schutzmechanismen realisiert. Sollte es dennoch zu einem Hackerangriff kommen, ist es wichtig, dass dann auf den Roboter keine gefährlichen Bewegungen ausgelöst werden können. Dazu sind Roboter unter anderem mit einem Sicherheitsscanner mit Abstandssensor versehen, damit sie z.B. nicht gegen die Wand fahren.
Ein Blick in die Zukunft
Im Bereich der mobilen Robotik wird sich in den nächsten Jahren viel tun, z.B. bei der Vernetzung. Wo beispielsweise vier kleinere Roboter statt eines großen gemeinsam an einer Transportaufgabe arbeiten, werden kleine Motoren benötigt, die absolut präzise arbeiten. Sonst kommt der Roboterschwarm ins Stolpern bzw. gerät aus dem Takt. Um die Ausfallsicherheit zu verbessern, müssen Encoder absolut störsicher sein, damit der Roboter nicht durch externe Störungen beeinflusst wird. Bei Faulhaber setzt man deshalb zum Teil zwei Encoder pro Motor ein. Mit der Weiterentwicklung von mobilen Robotern werden sich auch immer wieder die Anforderungen an die eingesetzten Antriebe verändern. Hier ist es von Vorteil, dass sich die Komponenten des modular aufgebauten Angebots der Antriebsexperten flexibel kombinieren lassen. Rein rechnerisch sind aus der Kombination der angebotenen Getriebe, Encodern, Controllern etc. 25 Millionen Varianten möglich, wovon ein beachtlicher Anteil bereits in der Praxis realisiert wurde. Egal, wie sich die mobile Robotik also weiterentwickelt, es findet sich für nahezu jede bestehende wie auch für zukünftige Anwendungen der optimale Antrieb.
Teilen: · · Zur Merkliste