SMC JMHZ2: Klein, sicher, sparsam - Pneumatischer Parallelgreifer sorgt auf engem Raum für festen Griff
Enge Platzverhältnisse bei Roboter- oder Pick-and-place-Anwendungen sind keine Seltenheit – und für optimierte Produktionsprozesse sogar von Vorteil. Gleichzeitig muss stets eine sichere, aber flexible Materialhandhabung gewährleistet sein. Um diesen Anforderungen auf hohem Niveau noch besser gerecht zu werden, hat SMC die neuen pneumatischen Parallelgreifer der Serie JMHZ2 entwickelt. Besonders kompakt designt können sie auch auf kleinstem Raum eingesetzt werden, verursachen ein geringeres Trägheitsmoment und ermöglichen einen maximal langen Abstand zum Greifpunkt.
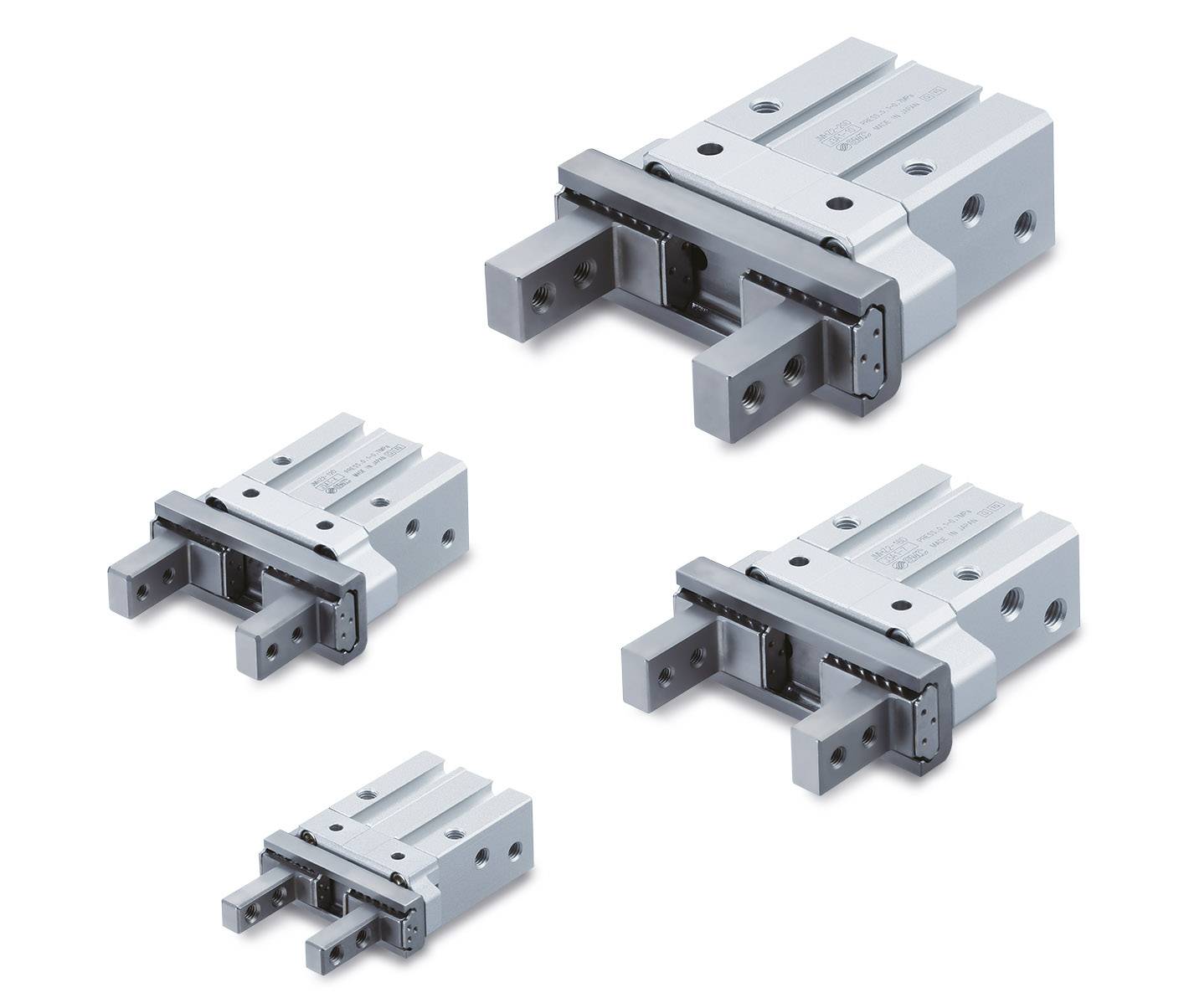
Die pneumatischen Parallelgreifer der Serie JMHZ2 sorgen bei Roboter- und Pick-and-place-Anwendungen dank ihres kompakten Designs auch bei wenig Platz für sicheren Halt bei schnellen Bewegungen und sparen dabei noch Energie. © SMC
Über alle Branchen hinweg: Wenn für Anwendungen bei der Materialhandhabung wenig Platz zur Verfügung steht, müssen Anlagenplaner auf möglichst kleine und flexible Lösungen zurückgreifen. Zugleich bestehen aber auch stets hohe Anforderungen an Sicherheit, Zuverlässigkeit und Produktivität. SMC, der Spezialist für pneumatische und elektrische Automatisierung, hat all diese Eigenschaften beim neuen pneumatischen Parallelgreifer der Serie JMHZ2 unter einen Hut gebracht: eine kompakte Lösung mit reduziertem Gewicht, längerem Greifpunkt und energieeffizient dank geringerem Druckluftverbrauch.
Schlank, präzise und schnell
SMC hat bei seiner neuen Lösung ordentlich auf Diät gesetzt: Im Vergleich zum bestehenden Produkt MHZ2 ist die Gesamtlänge in der größten Version des JMHZ2 um bis zu 21,7 mm und die Dicke um bis zu 7,6 mm verkleinert worden, was in diesem Fall 180 g (- 43 %) an Gewicht einspart. Das wirkt sich beispielsweise positiv auf Roboter-Anwendungen aus, weil so die Trägheitslast am Greifarm abnimmt, in der Folge schnellere Bewegungen möglich sind und dadurch die Produktivität dank erhöhter Zykluszeiten steigt. Durch die Verkleinerung profitieren Anwender insgesamt von geringeren Maschinenabmessungen, wodurch der Einsatz in engeren Räumlichkeiten möglich wird.
Zusätzlich überzeugt die Serie JMHZ2 durch eine Vielzahl an Montageoptionen, was wiederum Vorteile bei Platzmangel bedeutet. Die verschiedenen Gehäuse-Gewindebohrungen ermöglichen neben einer axialen auch die seitliche Montage des pneumatischen Parallelgreifers – in zweitem Fall auch über Durchgangsbohrungen. Zudem lassen sich die Greiffinger in dreifacher Ausführung anbringen: über eine Gewindebohrung in Öffnungs-/Schließrichtung, in seitlicher Montage mit Gewindebohrung und schließlich über eine Durchgangsbohrung in Öffnungs- und Schließrichtung. Gleichzeitig bietet die Lösung eine sehr präzise Handhabung dank Wiederholgenauigkeit der Präzisions-Linearführung von ±0,01 mm.
Mehr Sicherheit bei der Handhabung
Auch bei einem kleineren Kolbendurchmesser ist ein längerer Abstand zum Greifpunkt möglich. War beim Vorgängermodell bei maximal 60 mm Schluss, schafft der JMHZ2 einen Greifpunkt von bis zu 90 mm – wohlgemerkt bei gleichbleibender Bohrungsgröße in einem kleineren Gehäuse. Anwender können damit eine größere Distanz zum Gehäuse gewährleisten, sodass Störungen zwischen Greifergehäuse und Maschine vermieden werden. Noch mehr Sicherheit bietet die Option, kleine elektronische Signalgeber direkt am Parallelgreifer zu montieren. Damit lassen sich Werkstücke unterschiedlicher Größe erkennen und die Endlage des Greifers feststellen.
Teilen: · · Zur Merkliste