Schunk Co-act Gripper JL1: Hand in Hand
Sichere und kommunikative Greifer für die Mensch-Roboter-Kollaboration: Die Mensch-Roboter-Kollaboration erfordert intelligente und sichere Greifer. In Technologiestudien zeigt Schunk, worauf es bei MRK-fähigen Aktoren ankommt, welche Mindeststandards erfüllt sein müssen und was heute schon möglich ist. Mit dem Schunk Co-act Gripper JL1 definiert der Greiftechnikspezialist einen neuen Benchmark für MRK-Greifer der Zukunft.

Schon heute kann das Schunk Co-Act Team MRK-Greifer als kundenspezifische Lösungen realisieren. Hier wurde beispielhaft ein elektrischer 2-Finger-Parallelgreifer Schunk EGN als MRK-Greifer fürs Felgenhandling ausgerüstet.
Als Schunk vor rund zwei Jahren das weltweit erste zertifizierte Safety Greifsystem präsentierte, war abzusehen, dass der Kompetenzführer für Spanntechnik und Greifsysteme schon bald nachlegen wird. Ralf Steinmann, Geschäftsbereichsleiter Greifsysteme bei Schunk, hatte bereits damals die barrierefreie Kollaboration von Mensch und Roboter als Ziel für die Produktion der Zukunft definiert. Nur 24 Monate später lassen die Entwicklungsingenieure des innovativen Unternehmens mit den Technologiestudien der Schunk Co-Act Gripper Taten folgen. Diese haben das Potenzial, das Greifen in eine neue Dimension zu heben.
Schunk bleibt dabei dem Erfolgsprinzip des modularen Greiferbaukastens treu. Anwender sollen auch künftig maßgeschneiderte Lösungen aus dem Standard realisieren können, ohne dass es zu teurem Over-Engineering kommt. In getrennten Arbeitsräumen, in denen pneumatische Module seit Jahren etabliert sind, sollen diese auch künftig ihren Dienst tun. Bewährte Komponenten wie das Flaggschiff Schunk PGN-plus werden daher konsequent weiterentwickelt und technologischen Updates unterzogen. So verfügt der neue Schunk PGN-plus über ein vergrößertes Stützmaß zwischen den sechs lasttragenden Schultern der patentierten Vielzahnführung. Dadurch können noch höhere Momente aufgenommen und längere Finger eingesetzt werden. Eine Dauerschmierung über durchgängige Schmierstofftaschen in der Vielzahnführungskontur sorgt dafür, dass die Greifer unter normalen, sauberen Einsatzbedingungen lebenslang wartungsfrei sind. Last but not least ermöglicht die vergrößerte Fläche des Antriebskolbens noch höhere Greifkräfte. Zusätzlich überträgt Schunk das Leistungspaket seines pneumatischen Alleskönners mit dem neuen PGN-plus Elektrisch auf die Welt der mechatronischen Greifsystemkomponenten.

Mit einer Greifkraft unter 140 N/mm² und ausgestattet mit einer weichen Hülle erfüllt der Kleinteilegreifer Schunk EGP alle grundlegenden Bedingungen für den Einsatz in MRK-Anwendungen. Er ist bereits heute als Sonderlösung realisierbar.
Abgestufte Sicherheitskonzepte
Rücken die Arbeitsräume von Mensch und Roboter näher zusammen, weil z. B. Bediener die Anlage betreten, um Fehlteile zu entnehmen, Teilespeicher zu bestücken oder Störungen zu beheben, ermöglichen die Schunk Safety Greifsysteme EGN und EZN in Kombination mit dem Schunk Regler ECM und dem Schunk Safety-Modul ECS die Funktionalitäten SLS, SOS und STO. Im Zusammenspiel mit Trittmatten, Türschaltern, Lichtvorhängen oder 3D-Kameras zur Raumüberwachung können abgestufte Schutzzonen definiert werden, ohne den Produktionsprozess bei zu engem Mensch-Maschinen-Kontakt durch Notabschaltungen komplett zu unterbrechen. Stattdessen gehen die Greifer, je nach aktivierter Schutzzone, entweder in eine sicher limitierte Geschwindigkeit oder in einen sicheren Betriebshalt. Im sicheren Betriebshalt werden die Greifer kontinuierlich bestromt, sodass gegriffene Teile auch ohne mechanische Greifkrafterhaltung zuverlässig gehalten werden. Sobald die Schutzzone wieder freigegeben ist, schalten sie verzögerungsfrei in den regulären Betriebsmodus zurück, ohne dass die Anlage neu angefahren zu werden braucht.
Wo eine Vollautomatisierung von Produktions- oder Montagelinien nur bedingt wirtschaftlich umsetzbar ist oder menschliche Fähigkeiten für den Prozess unabdingbar sind, werden Teilprozesse herausgelöst und künftig immer stärker zwischen Mensch und Roboter aufgeteilt. Dabei übernehmen autonom operierende Cobots, also Roboter, die im unmittelbaren Umfeld des Menschen eingesetzt werden, Aufgaben, die ergonomisch ungünstig oder besonders eintönig sind. Als intelligente Hebe- oder Positionierungshilfe etwa reduzieren sie die physische Belastung des Menschen und sorgen innerhalb der Prozesskette für eine hohe Effizienz. Verglichen mit einer Vollautomatisierung sinkt bei Zusammenarbeit von Mensch und Roboter Hand in Hand der Platzbedarf. Auch der Prozess lässt sich wesentlich flexibler gestalten. Vor allem bei Montageanwendungen wird die Zahl robotergestützter Assistenzsysteme nach Ansicht der Spezialisten von Schunk daher rasant zunehmen.

Weiche Hülle – intelligenter Kern: Der Schunk Co-act Gripper JL1 ist ein Meilenstein auf dem Weg zur Mensch-Roboter-Kollaboration. Ein Touch-Screen im Greifergehäuse und LED-Panels in den Fingern ermöglichen beim Schunk Co-act Gripper JL1 eine unmittelbare Kommunikation mit dem Bediener.
Co-act Gripper für Interaktion und Kommunikation
Je enger Mensch und Roboter zusammenarbeiten, desto höher sind die Sicherheitsanforderungen. Genügt in der untersten Stufe, bei getrennten Arbeitsräumen, eine Risikobeurteilung nach DIN EN ISO 12100 und für den Bereich der funktionalen Sicherheit eine Zertifizierung der Maschinensicherheit nach DIN EN ISO 13849, sind bei der unmittelbaren Mensch-Roboter-Kollaboration zusätzlich die Schutzprinzipien der DIN EN ISO 10218-1/-2 und DIN EN ISO/TS 15066 zu berücksichtigen.
Dafür steht die Schunk Co-act Gripper Familie. Bereits in der Basisstufe sollen Co-act Gripper künftig die drei zentralen Forderungen einer sicheren Mensch-Roboter-Kooperation erfüllen: Sie verlieren nie das gegriffene Objekt, sie erkennen immer einen Kontakt mit dem Menschen und sie verletzen unter keinen Umständen beim Greifen. Mit Unterstützung unterschiedlicher Sensoren kann der Greifprozess in Echtzeit angepasst werden. Situations-, Umgebungs- und Einsatzbedingungen werden über mehrere „Sinne“ aufgenommen, bewertet und kommuniziert. So sind Schunk Co-act Gripper künftig in der Lage, alle relevanten Prozess- und Umgebungsdaten an die Steuerungs- und Produktionssysteme zu übermitteln. Dabei stehen die Prozessoptimierung, der intelligente Materialfluss und die ständige Dokumentation im Fokus. Die Module der Co-act Reihe sind herstellerunabhängig konzipiert und auf allen relevanten MRK-Robotern einsetzbar.

Weiche Hülle – intelligenter Kern: Der Schunk Co-act Gripper JL1 ist ein Meilenstein auf dem Weg zur Mensch-Roboter-Kollaboration.
Erster intelligenter MRK-Greifer
Wohin die Entwicklung geht, verdeutlich der Co-act Gripper JL1, der erste intelligente MRK-Greifer, der unmittelbar mit dem Menschen interagiert und kommuniziert. Ob weiche Hülle, fließende Formgebung, Schutz vor Werkstückverlust oder Kommunikationsinterface über ein in den Greifer integriertes LED-Panel: Schunk zeigt mit dem Co-act Gripper JL1 eindrucksvoll, worauf es in MRK-Anwendungen ankommt.
Kennzeichnend für den JL1 sind fünf Merkmale: Erstens ein sicherer Antrieb, der ein breites Greifkraftspektrum ermöglicht und zugleich die funktionale Sicherheit gewährleistet. Bei einer Prozessunterbrechung ist also stets dafür gesorgt, dass das gegriffene Teil zuverlässig gehalten wird. Zweitens eine Umfeld-Sensorik, welche die Umgebung des Greifers erfasst. Drittens eine Software, welche die Signale der Sensoren auswertet und verarbeitet. Viertens eine Begrenzung der Greifkraft, die unmittelbar dann erfolgt, wenn es zu einem unerwünschten Kontakt mit dem Menschen kommt. Und last but not least eine harmonische Außenkontur ohne scharfe, spitze oder schneidende Kanten.

Mithilfe kapazitiver Sensoren erkennt der Schunk Co-act Grip-per JL1 einen menschlichen Kontakt und geht automatisch in den sicheren Betriebshalt.

Über ein komplexes Zusammenspiel unterschiedlicher Sensoren erfasst der Schunk Co-act Gripper JL1 permanent seine Umgebung.
Sensorische Aura zur Umgebungsüberwachung
Mithilfe eigens entwickelter Greifstrategien und Kraftmessbacken in den Fingern kann der Greifer sein Verhalten in Echtzeit darauf abstimmen, ob das Werkstück oder womöglich eine menschliche Hand gegriffen wird – angesichts seiner hohen Greifkraft keine unwesentliche Entscheidung. Mechanisch ermöglicht der Greifer sowohl einen Parallel- als auch einen Winkelgriff, um unterschiedlichste Objekte zuverlässig zu handhaben. Abgestimmt auf die jeweilige Anwendung werden Anlagenplaner und Anwender künftig ein komplexes Zusammenspiel unterschiedlicher Sensoren und Sicherheitsmechanismen nutzen können. Kraftmessbacken und eine visuelle Überwachung mittels Kamera zählen ebenso dazu wie Häute aus taktilen und kapazitiven Sensoren oder eine strombasierte Kraftregelung.
Ähnlich wie beim Menschen, der meist mehrere Sinne kombiniert, um eine Situation zu bewerten, ermöglicht beim Co-act Gripper JL1 eine sensorische Aura die mehrkanalige Wahrnehmung der Umwelt. Spezielle Software bündelt die unterschiedlichen Informationen aus den einzelnen Sensorquellen und leitet daraus die korrekte Information ab. Via OPC UA ist der Greifer darüber hinaus in der Lage, mit dem Roboter sowie mit der übergeordneten Anlagensteuerung zu kommunizieren. Damit schafft er die Voraussetzung für eine flexible Prozessgestaltung im Sinne von Industrie 4.0. Zugleich fungiert der Greifer als direktes Kommunikationsmittel der Anlagensteuerung zum Bediener. Über LED und eine Farbsystematik informiert er darüber, ob die Anlage betriebsbereit oder das korrekte Werkstück gegriffen ist. Die Identifikation der Bauteile kann je nach Anwendung wahlweise über definierte Arbeitsräume, RFID oder visuelle Codes erfolgen. Ein integrierter Touchscreen ermöglicht darüber hinaus die unmittelbare Kommunikation mit dem Greifer sowie das Teachen oder Umschalten in verschiedene Betriebsarten.
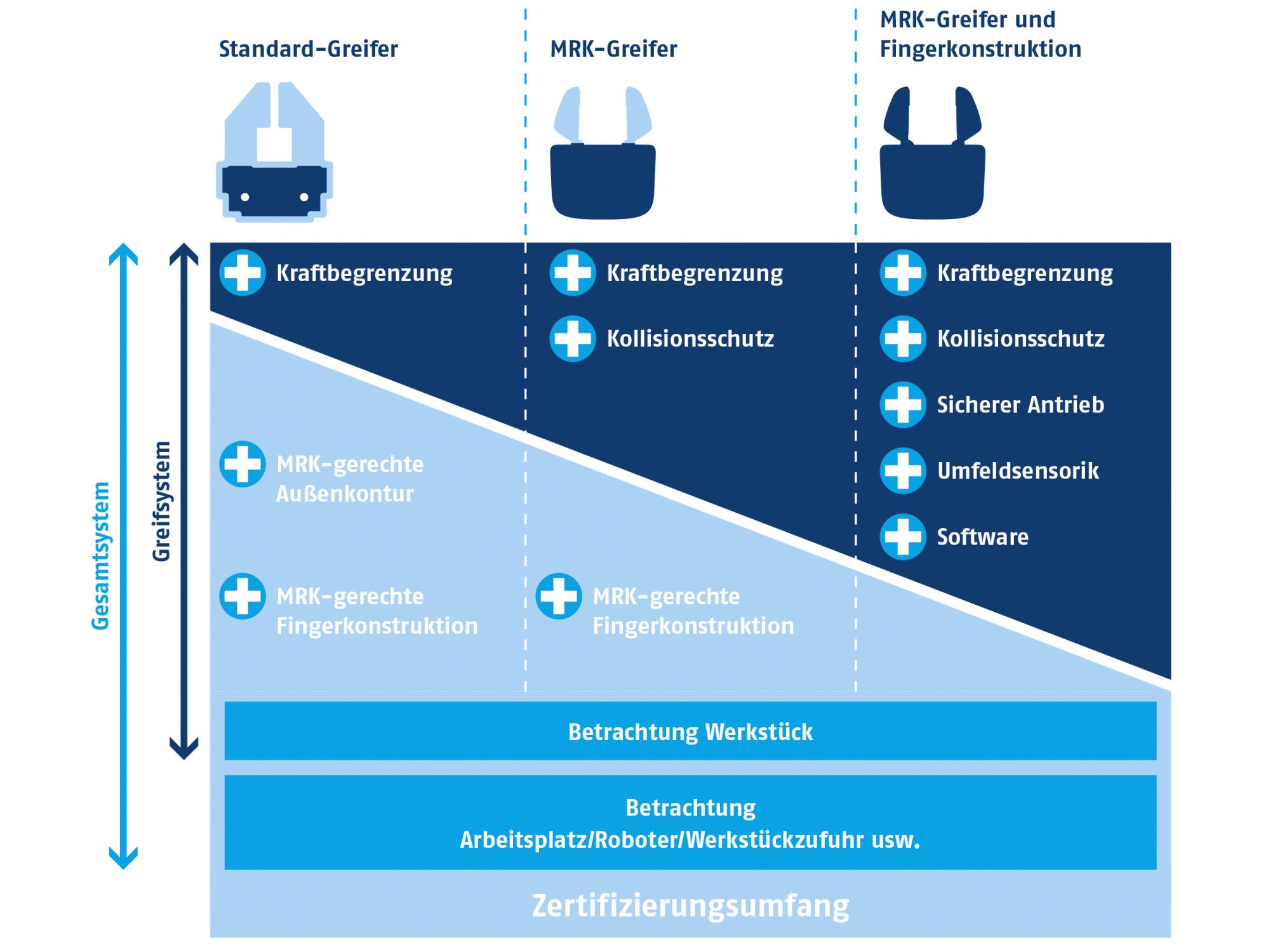
Die einzelnen Stufen auf dem Weg zum zertifizierten MRK-Greifsystem. Zusätzlich zu den Features des Greifers müssen für eine sichere Mensch-Maschinen-Kollaboration stets auch äußere Faktoren wie die Arbeitsumgebung, der Roboter und die Werkstückzufuhr berücksichtigt werden.

Die Marke Schunk Co-act Gripper umfasst alle kollaborativen, sicheren Schunk Greifer.
MRK-Kompetenzbündelung im Co-act Team
Auf Basis des Technologieträgers wird Schunk nun im Feinschliff die einzelnen Standardmodule der Co-act Gripper Familie entwickeln. Bereits bevor das Standardprogramm auf den Markt kommt, ist Schunk jetzt schon in der Lage, individuell auf die jeweilige Anwendung abgestimmte MRK-Greifer als kundenspezifische Lösung zu liefern. Speziell dafür hat Schunk das interdisziplinär zusammengesetzte Schunk Co-act Team gebildet, mit eigens zu diesem Zweck ausgebildeten Spezialisten aus den Bereichen Konstruktion, Produktmanagement, Montage und Vertrieb. Das Spezialisten-Team gewährleistet unabhängig vom eingesetzten MRK-Roboter eine einzigartige Kompetenzdichte zum Thema kollaboratives Greifen. Es ermöglicht eine schnelle und zielgerichtete technische Umsetzung sowie aktive Unterstützung bei der erforderlichen Risikobeurteilung.
Teilen: · · Zur Merkliste