Ein wahres „Schmankerl“ der Automatisierung
Perfektes Zusammenspiel von Roboter, Bildverarbeitung und Datenbank: Mit individuell konzipierten, datenbankbasierten Machine-Vision- und Robotic-Vision-Systemen hilft die NeuPro Solutions GmbH ihren Kunden, Prozesse entscheidend zu optimieren und die Produktivität zu steigern. So auch einem renommierten Hersteller von Steuerungen für Werkzeugmaschinen, für den das Unternehmen eine Anlage realisiert hat, in der zwei ABB-Roboter mit tatkräftiger Unterstützung einer raffinierten Bilderverarbeitung sowie einer Oracle-Datenbank die Tastaturbleche der Steuerungen vollautomatisiert mit den nötigen Tasten fehlerfrei bestückt. Von Ing. Norbert Novotny, x-technik

Zwei mit jeweils einem Doppelgreifer ausgestattete ABB-Roboter des Typs IRB120 bestücken simultan Tastaturbleche. (Bilder: x-technik)
Shortcut
Aufgabenstellung:
Tastenbestückung von Tastaturblechen für CNC-Steuerungen.
Lösung:
Anlage mit zwei ABB-Robotern, Bildverarbeitung und Oracle-Datenbank.
Nutzen:
Effiziente Umstellung von manueller auf vollautomatisierte Bestückung.
Seit 1999 entwickelt die NeuPro Solutions GmbH aus Vilsbiburg (D) innovative Automatisierungslösungen zur Verfahrensoptimierung in den Bereichen Fertigung, Handling, Qualitätssicherung sowie Tracking & Tracing. Dabei konzentrieren sich die Bayern technologisch hauptsächlich auf die intelligente Verknüpfung optischer Systeme mit Echtzeitdatenbanken, SPS-Steuerungen und der Robotik bzw. mechanischen Komponenten. „Eine ganzheitliche Betrachtungsweise der jeweiligen Prozesse steht bei uns im Fokus. Unser Anspruch ist es dabei, für Problemstellungen auch Lösungen auf völlig neuem Wege zu finden, um für unsere Kunden Prozesse entscheidend zu optimieren, Qualität durchgängig zu sichern, Produktivität zu steigern sowie Kosten zu senken“, erläutert Michael Neumaier, CEO von NeuPro Solutions.
„Anlagen von NeuPro Solutions sind niemals 08/15-Lösungen. Das Unternehmen geht dabei in Grenzbereiche, wovon andere zumeist die Finger lassen“, so Ing. Martin Moosbacher, Projektmanager bei ABB. Michael Neumaier kann das nur bestätigen: „Je komplexer die Aufgabenstellung, desto interessanter wird es für uns.“ Dafür brauche es allerdings absolut kompetente und zuverlässige Partner. „Die Zusammenarbeit mit der Robotics Division von ABB in Österreich funktioniert seit Jahren ausgezeichnet. Die ABB-Spezialisten sind mit der gleichen Leidenschaft wie wir bei der Sache und beliefern uns nicht nur mit hochpräzisen Robotern, sondern unterstützen uns bei Projekten zudem mit ihrem beeindruckenden Know-how“, ist Neumaier voll des Lobes.

Das perfektes Zusammenspiel von Roboter, Bildverarbeitung und Datenbank macht diese Sortier- und Bestückungsanlage aus.

Michael Neumaier
CEO von NeuPro Solutions
„Je komplexer die Aufgabenstellung, desto interessanter wird es für uns. Unser langjähriger Partner ABB Österreich ist mit der gleichen Leidenschaft wie wir bei der Sache und beliefert uns nicht nur mit hochpräzisen Robotern, sondern unterstützt uns bei solchen Projekten mit ihrem beeindruckenden Know-how.“
Ausgeklügeltes System
Genau diese Attribute sind auch bei einer von NeuPro Solutions realisierten Sortier- und Bestückungsanlage für einen Hersteller von Steuerungen für Werkzeugmaschinen von Nöten. Doch bevor die beiden ABB-Roboter des Typs IRB120 ihre Qualitäten bei diesem System unter Beweis stellen und Tastaturbleche von CNC-Steuerungen fehlerfrei mit Tasten bestücken, müssen zunächst in der Anlage noch die Voraussetzungen dafür geschaffen werden.
Die sogenannten Tastkappen (Spritzgussteile) werden als Schüttgut über einen Stückförderer in einen Mischer transportiert. Mittels einer Schnecke werden sie schachtweise aufgeteilt und anschließend über eine konische Walze auf eine sich drehende Glasscheibe mit einem Durchmesser von 1,60 Meter gelegt. „Dadurch wird gewährleistet, dass bis zu 6.000 Tasten vereinzelt auf dem kreisrunden Glastisch liegen. Vier Zeilenkameras erzeugen dann mit vier simultan aufgenommenen Bildern in unterschiedlicher Belichtung bzw. Beleuchtung ein präzises Abbild des in Segmente eingeteilten Glastisches“, beschreibt Neumaier dieses ausgeklügelte System. Eine Bildverarbeitungssoftware identifiziert daraus jede einzelne Taste und speist eine Oracle-Datenbank mit den gewonnenen Informationen. Das System weiß exakt, welche Buchstaben auf welcher Position und in welchem Segment zu finden sind. „Damit generieren wir sozusagen ein virtuelles Lager, das die Basis für die Arbeit der Roboter bildet“, so Neumaier weiter.

Mittels einer Schnecke (rechts oben) werden die Tastkappen schachtweise aufgeteilt und über eine konische Walze vereinzelt auf einen sich drehenden Glastisch (Bildmitte) gelegt. Vier Zeilenkameras (links unten) erzeugen anschließend ein exaktes Abbild der Tastenbelegung.

Mit einem ausgeklügelten System werden bis zu 6.000 Tasten vereinzelt auf die Glasscheibe gelegt.

Anhand der simultan aufgenommenen Bilder der Zeilenkameras weiß das System exakt, welche Buchstaben auf welcher Position des Glastisches zu finden sind.
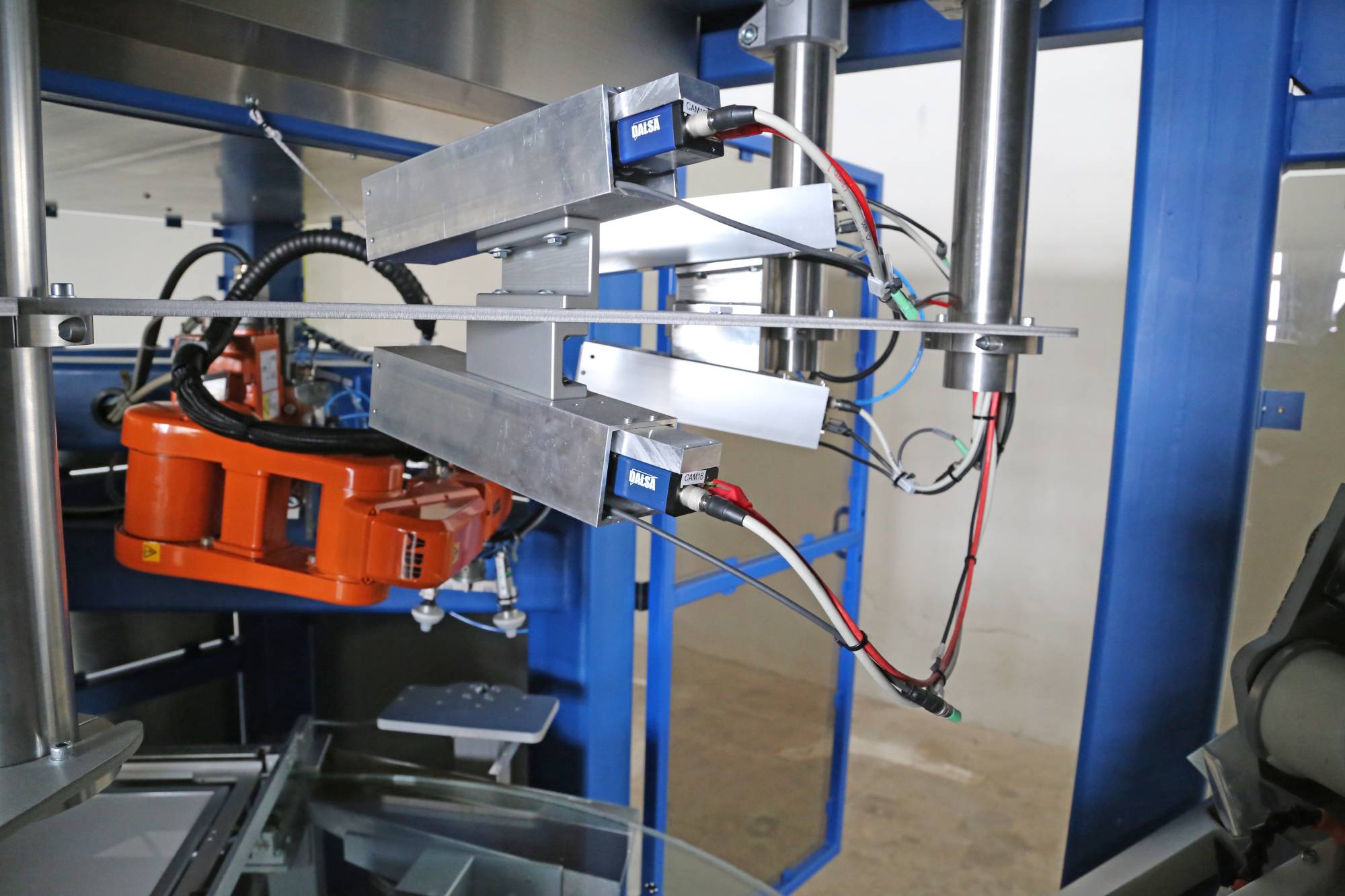
Pro Robotergreifer sind vier weitere Kameras im Einsatz. Eine dient zur Feststellung der exakten Position der Tastkappe am Greifer, die anderen drei sind für die Qualitätsprüfung der Teile zuständig.

Geballtes Know-how in der Automatisierung: Martin Moosbacher (ABB), Michael Neumaier und Harald Kopp (beide NeuPro Solutions)
Präzises Zusammenspiel
Es ist nun also alles angerichtet, dass die mit jeweils einem Doppelgreifer ausgestatteten ABB-Roboter die per Einschubfach in die Anlage beförderten Tastaturbleche simultan bestücken können. Für eine Qualitätsprüfung sind pro Greifer noch vier weitere Kameras im Einsatz. „Eine dient zur Feststellung der exakten Position der Tastkappe am Greifer, die anderen drei sind dafür zuständig, die Teile auf Fehler in der Oberfläche oder Prägung zu untersuchen sowie farblich zu unterscheiden. Als fehlerhaft detektierte Tasten werden in einem eigenen Behälter gesammelt“, geht der Geschäftsführer von NeuPro Solutions in Detail.
Neben der Robotersteuerung und einer übergeordneten SPS, die für die Sicherheit der Anlage zuständig ist, sind darüber hinaus noch fünf leistungsstarke „Rechner“ allein für die Kamerasysteme im Einsatz. „Roboter, externe Achse, SPS und Kamerasysteme kommunizieren nicht hierarchisch, sondern kreuz und quer im Netzwerk. Dadurch wird die Programmierung der Software äußerst komplex, das System jedoch pfeilschnell. Die Oracle-Datenbank, die alles zusammenführt, ist dabei das allwissende Gedächtnis und das eigentliche Hirn der Anlage“, bringt es Neumaier auf den Punkt.
Die präzise Koordination der Roboterarme im Zusammenspiel mit den Kamerasystemen sowie der Drehachse des Glastisches waren laut dem Geschäftsführer eine der großen Herausforderungen bei diesem Projekt. Um für eine fehlerfreie Bestückung geforderte Genauigkeit von einem Zehntel Millimeter zu erreichen, benötige es einen perfekt aufeinander abgestimmten Dialog der beteiligten Systeme. „Wenn du mit einem Roboter so viel kommunizierst wie wir bei dieser Anlage, muss man wirklich in die Tiefen eines Robotercontrollers blicken und über das interne Timing genau Bescheid wissen. D.h. wann kommt ein Telegramm wirklich beim Roboter an oder inwieweit beeinflusst das sogar seinen Bahnenrechner etc.“, verdeutlicht Neumaier, der abschließend noch die ausgezeichnete Unterstützung seitens ABB Österreich hervorhebt: „Wir finden es höchst bemerkenswert, mit welchem mathematischen und programmiertechnischen Know-how sich ABB bei diesem Projekt eingebracht hat. Das war tiefenpsychologische Analytik eines Robotercontrollers.“
Teilen: · · Zur Merkliste